5.3. Приклади роботи з годинником реального часу та зі змінними часових типів
Завдання. Розрахунок тривалості часу неперервної роботи механізму
Розробити програму розрахунку тривалості часу неперервної роботи механізму до його останнього вимикання.
Змінна M1_RUN (BOOL) відповідає за роботу двигуна M1 (стан контактів з пускача). Необхідно в момент зупинки двигуна отримати значення часу його роботи.
Рішення1. На основі функцій реального часу.
У цьому прикладі використаємо функції:
-
RRTC_DT, яка повертає з ПЛК значення реального часу в форматі типу DT (Date and Time);
-
SUB_DT_DT, яка розраховує різницю змінних типу DT і повертає значення часу в форматі TIME.
Варіант рішення показаний на рис.5.18. У момент пуску запам’ятовується значення реального часу у змінній M1_StartTime (тип DT). У момент зупинки запам’ятовується значення реального часу у змінній M1_StopTime (тип DT) а також розраховується різниця між часом пуску та зупинки за допомогою функції SUB_DT_DT. Результат різниці отримуємо в змінній M1_RuningTime типу TIME.
Для відлову фронтів використовується функціональний блок TRIGGER: вихід RISE спрацьовує на один цикл по переході FALSE->TRUE, а вихід FALL – на один цикл, по переході TRUE->FALSE. При використанні M1_RUN типу EBOOL замість BOOL, для відлову фронтів можна користуватися функціями RE та FE.
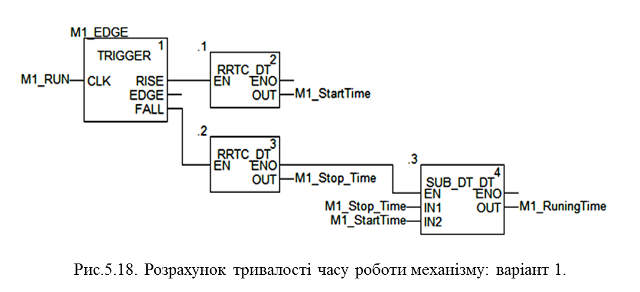
Рис.5.18. Розрахунок тривалості часу роботи механізму: варіант 1
Слід нагадати, що вхід EN активує/деактивує виконання функцій та функціональних блоків. Крім того слід відмітити, що максимальне значення у змінних типу TIME - T#49D_17H_2M_47S_295MS (49 діб 17 годин). Якщо двигун може робити більше, SUB_DT_DT буде оброблений з помилкою, а системний біт %S18 (OVERFLOW) стане рівним TRUE.
Даний варіант рішення може бути використаний, коли крім тривалості роботи механізму, треба ще визначати час його останньої зупинки і запуску. У іншому випадку є сенс використовувати друге рішення на основі таймеру.
Рішення2. На основі таймеру.
Це рішення менш ресурсоємне і більш просте. Воно базується на таймері, який стартує при включенні M1_RUN і працює, поки M1_RUN=TRUE (рис.5.19). Уставка таймеру дорівнює 30 днів (можливий максимум 49 діб 17 годин). По задньому фронту сигналу M1_RUN(зупинка двигуна) вихід таймеру ET (плинне значення) записується в M1_RuningTime. Якщо двигун може працювати неперервно більше ніж 49 діб 17 годин такий підхід не годиться.
Для відлову заднього фронту використовується функціональний блок типу F_TRIG. При використанні M1_RUN типу EBOOL замість BOOL, для відлову заднього фронту можна скористатися функцією FE.
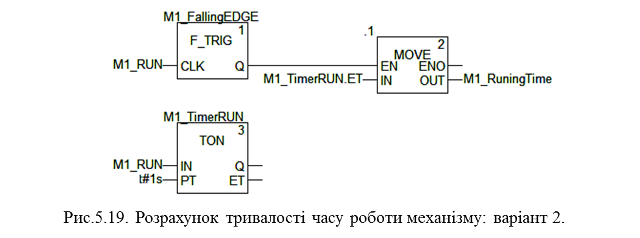
Рис.5.19. Розрахунок тривалості часу роботи механізму: варіант 2