5.6. Приклади створення та використання кусочно-лінійних функцій.
За допомогою кусочно-лінійних функцій можна організувати програмний задавач (формування завдання в залежності від часу), задавач співвідношень X/Y, реалізувати кусочно-лінійну апроксимацію нелінійної функції і т.д. Кусочно-лінійна функція визначена в діапазоні всіх дійсних чисел наступною залежністю:
 (5.5)
(5.5)
 (5.6)
(5.6)
Графічний вигляд кусочно-лінійної функції показаний на рис. 5.32.
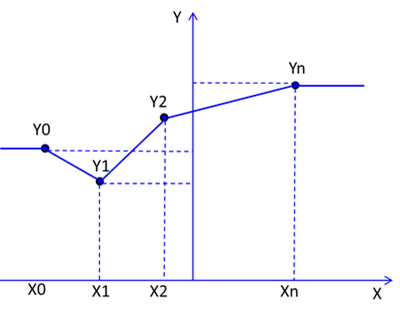
Рис.5.32. Кусочно-лінійна функція
У бібліотеці ControlLIB є функціональний блок LOOKUP_TABLE1, який реалізовує кусочно-лінійну функцію (див. параграф 6.3.3). Нижче розглянемо написання власного DFB для цих цілей.
5.6.1. Реалізація кусочно-лінійної функції
Завдання.
Розробити DFB для реалізації кусочно-лінійної функції.
Рішення.
Координати точок Xi і Yi у всьому діапазоні будемо задавати 2-ма масивами типу REAL. Враховуючи, що кількість точок залежить від задачі, в якій буде задіяний даний блок, масив повинен бути динамічним. У DFB параметри INPUTS, OUTPUTS та INOUT можуть бути визначені як ANY_ARRAY_xxx (де xxx тип масиву) – динамічний масив, що дозволяє прив’язувати до них фактичні параметри з довільним розміром масиву. Ми скористуємося цією функціональністю. Таким чином інтерфейс типу DFB блока з іменем PWL_FN має вигляд як на рис.5.33.
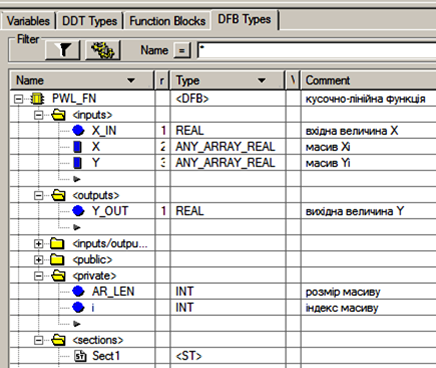
Рис.5.33. Опис DFB-типу PWL_FN
X_IN та Y_OUT – відповідно вхід та вихід функції. Масиви X та Y задають координати вузлів функції. Для роботи DFB визначені внутрішні змінні (private) i - для задання індексу масиву та AR_LEN для визначення довжини масиву. Без останньої можна б було обійтись, але використаємо для наглядності прикладу.
Програмну секцію є сенс написати на мовах ST або IL, так як використовуються масиви, для обробки яких потрібні цикли (рис.5.34).
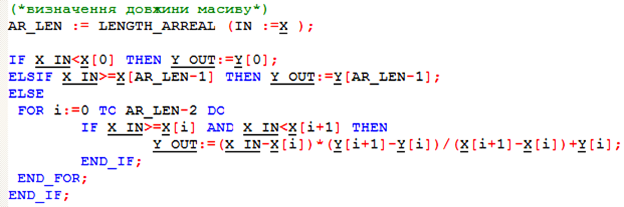
Рис.5.34. Програмна секція DFB-типу PWL_FN
На початку секції визначається довжина масиву за допомогою функції LENGTH_ARREAL, єдиним аргументом якої є один із масивів. Слід відзначити, що:
-
масиви X та Y обов’язково повинні бути одного разміру;
-
елементи X повинні рости з ростом індексу в масиві;
-
незалежно від того, з якого індексу починається фактичний параметри для X та Y, в програмній секції DFB масиви завжди будуть починатися з 0;
-
для роботи з динамічними масивами їх необхідно явно дозволити (Tools->Project Settings->Variables->AllowDynamicArray);
Далі в програмі, в залежності від значень X_IN розраховується Y_OUT.
5.6.2. Програма розрахунку об’єму рідини в резервуарі неправильної форми за датчиком рівня
Завдання.
Розробити програму для розрахунку об’єму рідини в резервуарі неправильної форми за датчиком рівня.
Основна концепція.
Об’єм рідини в резервуарі правильної форми можна визначити по рівню, підставивши його в формулу розрахунку об’єму. Найбільш простий випадок – це резервуари з незмінним перерізом по вертикалі (наприклад циліндричної форми), що дозволяє доволі просто масштабувати значення з датчика рівня, помноживши його на коефіцієнт. Однак для резервуарів з неправильною формою розрахувати об’єм по рівню доволі проблематично.
Один із способів – це експериментально визначити залежність об’єму від рівня. Для цього на етапі налагодження системи, на нелінійній ділянці (або по всій висоті) резервуара знімається характеристика V(L), де V – об’єм рідини, L – рівень. Спосіб визначення об’єму і тип датчика рівня в даному випадку не має значення, головне – це отримати кусочно-лінійну апроксимацію залежності з тією точністю, яка потрібна згідно умови задачі. Далі в програмі реалізувати обернену задачу – по заданій характеристиці V(L) визначати об’єм по рівню.
Рішення.
Скористуємось функціональним блоком типу PWL_FN з попереднього параграфу. По отриманим точкам V(L), наприклад 6 точок, задаємо два масиви V(0..5) та L(0..5). При визначенні масиву можна відразу задати значення елементів при ініціалізації. Далі їх можна змінювати, наприклад в конфігураційних екранах HMI/SCADA. Змінні та програма наведені на рис. 5.35.
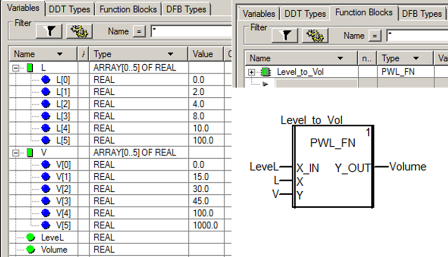
Рис.5.35. Використання DFB-типу PWL_FN при розрахунку об’єму
5.6.3. Програмний задатчик
Завдання.
Розробити тип функціонального блоку користувача для програмного задатчика.
Основна концепція.
У системах з програмним управлінням, регулятор повинен підтримувати значення, задане кусочно-лінійною залежністю від часу. Наприклад залежність може задаватися наступним графіком (рис.5.36).
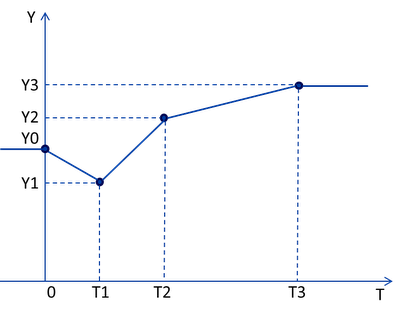
Рис.5.36. Діаграма для програмного задатчика
Такий регулятор крім блока, який реалізує один із законів регулювання (наприклад П, ПІ або ПІД), повинен вміщувати блок програмного задатчика (далі по тексту ПРЗ), як показано на рис.5.37.
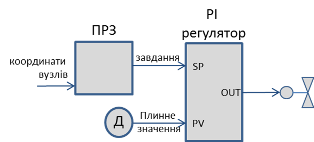
Рис.5.37. Структура регулятору з програмним задатчиком
У UNITY PRO для реалізації функціоналу ПРЗ можна використати бібліотечний блок LOOKUP_TABLE1, приклад використання якого показаний в параграфі 6.8.2. Тут розглянемо два варіанти з використанням функціональних блоків користувача.
Рішення1. З використанням спеціально розробленого DFB.
Конкретизуємо задачу: необхідно створити тип функціонального блоку, який буде на основі заданих координат 4-х вузлів графіка залежності розраховувати Y=f(T). Даний тип назвемо PRZ3. На рис.5.38 представлений виклик екземпляру блоку PRZ1 та інтерфейс блоку.
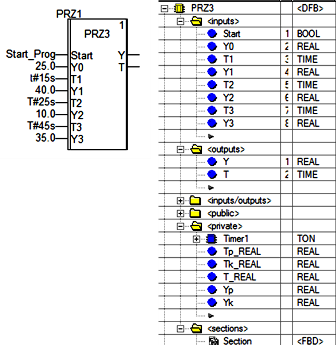
Рис.5.38. Структура DFB-типу PRZ3 та приклад його використання
Вхід Start – використовується для запуску внутрішнього таймеру, по якому проводиться розрахунок вихідного значення. При Start=FALSE значення виходу Y буде дорівнювати значенню ініціалізації Y0. Входи T1,Y1 і T2,Y2 і T3,Y3 – це задані координати відповідних вузлів. Крім розрахункового значення на вихід PRZ3 також подається значення внутрішнього таймеру.
Для роботи блоку потрібен таймер, тому в розділі Private включений екземпляр типу TON з іменем Timer1.
На рисс.5.39-5.40 показана програмна секція блоку PRZ3. Ідея заключається в розрахунку значення виходу на кожній ділянці між вузлами. На ділянці T≤T0 (до старту) значення Y=Y0, а на ділянці T≥T3 - значення Y=Y3. Розрахункових ділянок всього три: 0..T1, T1..T2, T2..T3. У межах цих ділянок вихідне значення розраховується за формулою:
 (5.7)
(5.7)
де Tp, Yp – координати вузла початку ділянки; Tk, Yk – координати вузла кінця ділянки.
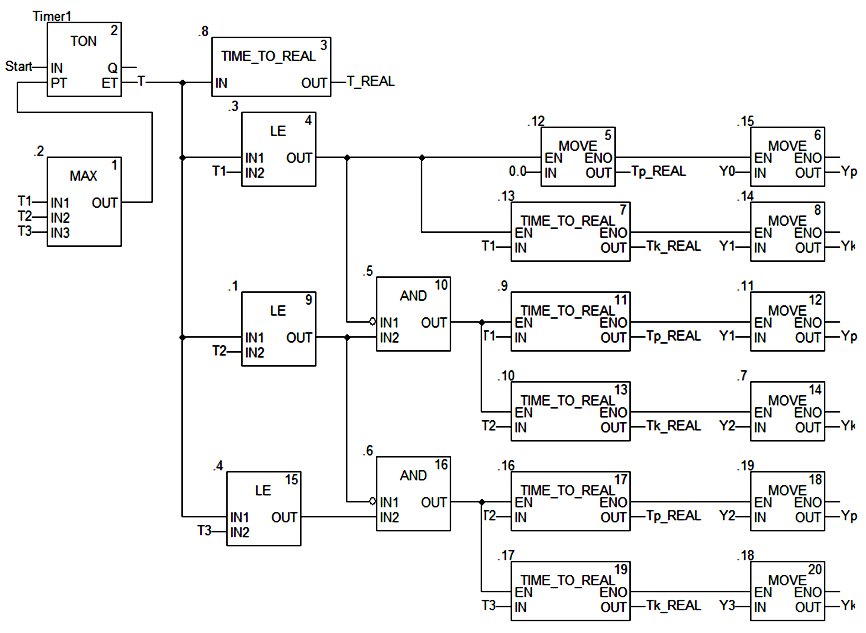
Рис.5.39. Програма DFB-типу PRZ3
Тобто, програма визначає на якій ділянці вона знаходиться, і присвоює Tp,Yp та Tk,Yk значення відповідних координат. Враховуючи, що координати T1,Т2,T3 мають тип TIME, їх попередньо необхідно перетворити в тип REAL, так як такий тип у виходу Y. Таким чином розділ блоку Private включає змінні Tp_REAL, Tk_REAL и T_REAL.
У блоці враховується, що кількість вузлів може бути менше ніж 4-ри. У цьому випадку вузли з 0-ю міткою часу не враховуються. Для цього на вхід внутрішнього таймеру Timer1 в якості уставки подається максимальне значення серед T1,T2,T3.
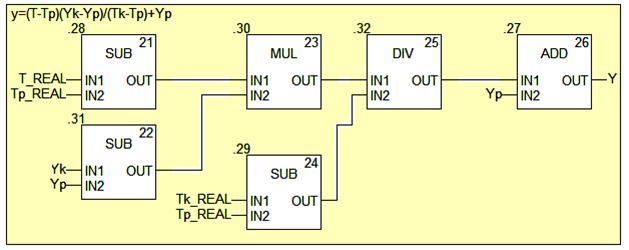
Рис.5.40. Програма DFB-типу PRZ3 (продовження)
Вихід таймеру ET подається на вхід блоку, а також перетворюється в значення типу REAL. Далі визначається ділянка, порівнюючи плинне значення таймеру з часовими координатами вузлів. Для запобігання роботи незадіяних вузлів використовується умова спрацювання попередньої уставки по AND. На кожній із ділянок відбувається переприсвоєння кінцевих точок. На рис.5.40 показана розрахункова формула на кожній із ділянок.
Рішення2. З використанням блоку PWL_FN.
У цьому варіанті використаємо функціональний блок з реалізацією універсальної кусочно-лінійної функції з параграфу 5.6.1. Для цього створюємо два масиви: Т – для координат вузлів по часу і Y – для координат вузлів по значенням. Програма буде мати вигляд як на рис.5.41.
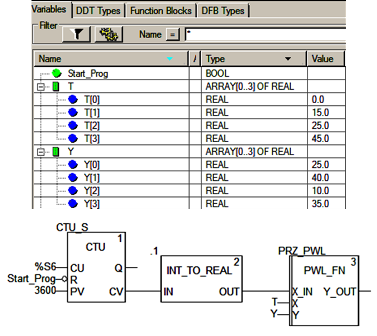
Рис.5.41. Використання PWL_FN для формування програмного задатчика
Лічильник CTU_S формує значення часу в секундах від початку спрацювання Start_Prog. Для цього на вхід CU подаються імпульси системного секундного меандру %S6. При Start_Prog=FALSE, лічильник обнуляється (CV=0). Уставка PV=3600 взята довільно, головне щоб була більше >=45, так як це остання точка по осі часу (T[3]=45.0). Функція INT_TO_REAL використовується тільки тому, що PWL_FN працює з типом REAL. Вихід PWL_FN і буде значенням ПРЗ.
Перевагою даного підходу порівняно з минулим заключається в його універсальності та компактності. У параграфі 6.8.2 показаний приклад використання в якості ПРЗ функціонального блоку LOOKUP_TABLE1.