6.4. Обробка вихідних даних контурів регулювання (сімейство Output Processing)
6.4.1. Блок управління реверсивним двигуном (SERVO)
Функціональний блок SERVO призначений для реалізації управляючих дій з регуляторів PI_B/PIDFF або інших блоків з використанням виконавчих механізмів типу реверсивного двигуна (серводвигун, наприклад МЕО). Для управляння серводвигунами використовуються два виходи - RAISE (“більше”) та LOWER (“менше”), на яких сигнал формується в залежності від значення входу IN (або INPD) та налаштування блоку (рис.6.28). У таблиці 6.23 показані параметри блоку SERVO.
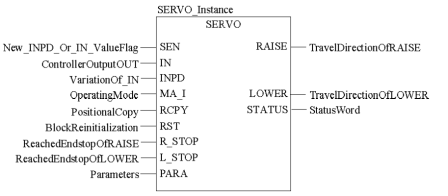
Рис.6.28. Виклик функціонального блоку SERVO
Таблиця 6.23 Параметри блоку SERVO
| Вхідні параметри | ||
|---|---|---|
| SEN | BOOL | 1 : є нові значення на входах INPD або IN 0 : немає нових значень на входах INPD або IN |
| IN | REAL | значення з абсолютного виходу блоку управління OUT (0 до 100%) |
| INPD | REAL | значення з інкрементального виходу блоку управління OUTD (-100% до 100%) |
| MA_I | BOOL | значення операційного режиму блоку регулятору до якого підключений SERVO (вихід MA_O) 1 : Автоматичний режим 0 : інший режим (ручний або слідкування) |
| RCPY | REAL | Зворотній зв’язок по позиції ВМ (0 до100%) |
| RST | BOOL | 1 : Ініціалізація функціонального блоку (відключення виходів та обнуління внутрішнього статусу блоку) |
| R_STOP | BOOL | кінцева позиція “відкритий” (досягнутий поріг по RAISE) |
| L_STOP | BOOL | кінцева позиція “закритий” (досягнутий поріг по LOWER) |
| PARA | Para_SERVO | Параметри (див. таб 6.24) |
| Вихідні параметри | ||
| RAISE | BOOL | Вихід “більше” (“відкрити”) |
| LOWER | BOOL | Вихід “менше” (“закрити”) |
| STATUS | WORD | Слово статусу |
Таблиця 6.24. Опис структурного типу Para_SERVO
| en_rcpy | BOOL | 1 : Використовується зворотній зв’язок по позиції ВМ (включити RCPY) |
| rcpy_rev | BOOL | 1 : Інвертувати RCPY (0 – це 100%, 100 – це 0%) 0 : Не інвертувати RCPY |
| t_motor | TIME | час повного відкриття регулюючого органу |
| t_mini | TIME | мінімальна довжина імпульсу |
Функціональний блок може використовуватись як з сигналом зворотного зв’язку по положенню виконавчого механізму (RCPY) так і без нього.
При використанні сигналу зворотного зв’язку (en_rcpy = TRUE), в якості управляючого входу SERVO треба використовувати вхід IN, який повинен бути зв’язаний з абсолютним виходом OUT регулятору PI_B/PIDFF. Для кожного нового значення виходу OUT, який формує регулятор, функціональний блок SERVO генерує дискретний вихід RAISE або LOWER з довжиною імпульсу пропорційною різниці IN-RCPY. При необхідності, вхід RCPY можна інвертувати (rcpy_rev=1), тобто коли показник положення регулюючого органу показує не процент відкриття, а процент закриття. Приклад діаграми роботи SERVO зі зворотним зв’язком по положенню ВМ показаний на рис. 6.29.
Якщо зворотний сигнал по положенню ВМ не використовується (en_rcpy = FALSE) то в якості управляючого входу SERVO, треба використовувати вхід INPD, який повинен бути зв’язаний з виходом OUTD регулятору PI_B/PIDFF. Для кожного нового значення виходу OUTD регулятору, блок SERVO генерує дискретний вихід RAISE або LOWER з довжиною імпульсу пропорційною INPD. Приклад діаграми роботи SERVO без зворотного зв’язку по положенню ВМ показаний на рис. 6.30.
Для правильного функціонування операційного режиму, вхід MA_I блоку SERVO повинен бути з’єднаний з виходом MA_O блоку регулятору.
Для формування імпульсу з тривалістю, пропорційною величині управляючого сигналу, необхідно вказати час повного відкриття регулюючого органу (t_motor). Тобто, наприклад, при формуванні на вході INPD значення 100%, блок SERVO сформує імпульс на виході RAISE рівним значенню t_motor. А при INPD рівним -10%, SERVO сформує імпульс на виході LOWER рівним значенню t_motor/10.
Для зменшення навантаження на двигун, тобто збільшення його терміну служби, задається мінімальний час імпульсу (t_mini). Якщо тривалість розрахованого імпульсу менша ніж t_mini, імпульс формуватися не буде, однак він буде врахований на наступних циклах.
Для точності регулювання, блок SERVO повинен викликатися з кожним циклом Задачі. Однак весь контур регулювання може оброблятися з меншою частотою, наприклад при використанні SAMPLETM (див. параграф 6.2.2). Для того щоб вказати блоку SERVO що регулятор PI_B/PIDFF оброблений і сформовані нові значення (особливо це стосується виходу OUTD регулятору), і його вихід OUT/OUTD а отже і вхід SERVO IN/INPD отримав нові значення, на вхід SEN подається TRUE. Таким чином, якщо в контурі для задавання періодичності обробки використовується блок SAMPLETM, то його вихід підключається паралельно до входів EN блоків PI_B/PIDFF і до входу SEN блоку SERVO.
У ручному режимі (MA_I=FALSE) блок SERVO обробляє входи IN/INPD в кожному циклі незалежно від значення входу SEN, що треба враховувати при написанні програми. Тобто при ручній зміні виходу OUT регулятору, він автоматично розрахує OUTD (див. параграф 6.2.5), який протримається на виході аж до наступного виклику регулятору. За цей час, зв’язаний з цим виходом вхід INPD блоку SERVO, буде оброблений декілька (n) раз, що затягне імпульс в n раз довше, ніж потрібно. Для подолання цієї проблеми, в ручному режимі після кожного виклику регулятору необхідно обнулювати змінну, прив’язану до OUTD та INPD (див. приклад в параграфі 6.8.3)
При використанні сигналу зворотного зв’язку (en_rcpy = TRUE) у ручному режимі блок SERVO буде видавати команди “більше” та “менше” на виконавчий механізм доти, поки входи RCPY та IN не будуть рівними. Це може негативно сказатися на процесі а також на роботі приводу та регулюючого органу. Варіант вирішення цієї проблеми показаний в прикладі з параграфу 6.8.3.
При досягненні крайнього положення регулюючим органом, тобто коли R_STOP=TRUE або L_STOP=TRUE, відповідний вихід виставляється в логічний нуль (RAISE=FALSE або LOWER=FALSE) незалежно від значення IN або INPD.
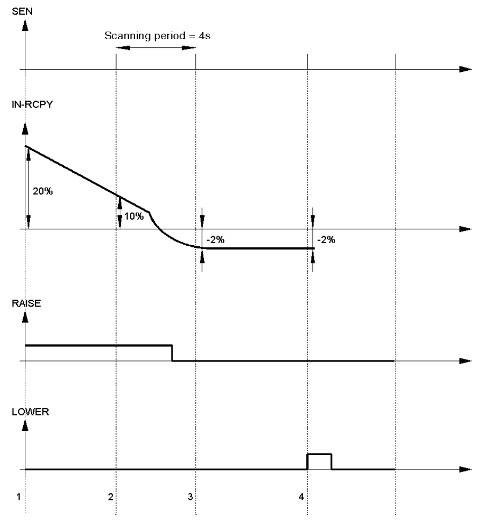
Рис.6.29. Приклад діаграми роботи блоку SERVO зі зворотним зв’язком по положенню ВМ
Розглянемо роботу SERVO в режимі використання зворотного зв’язку по положенню, тобто при en_rcpy=TRUE (рис.6.29). У цьому прикладі використовуються такі настройки: t_motor=t#25s, t_mini=t#1s, періодичність виклику основного регулятору (періодичність активації SEN) - 4s. Контур працює в автоматичному режимі (MA_I=TRUE). На діаграмі цифрами мітками позначені наступні ситуації.
-
При початковому скануванні контуру значення (IN-RCPY)=+20% : на виході RAISE генерується імпульс тривалістю 5s (=20% від 25s);
-
При наступному скануванні контур значення (IN-RCPY)=+10%: на виході RAISE=TRUE залишається ще протягом 2.5s (=10% від 25s); одна секунда, яка залишилась від попереднього разу вже не враховується;
-
На 3-му циклі сканування контуру (IN-RCPY)= -2%: це відповідає імпульсу 0.5s на виході LOWER, однак оскільки це менше ніж t_mini, то вихід LOWER=FALSE; тривалість 0.5s для LOWER залишається збереженим до наступного циклу перерахунку;
На 4-му циклі сканування контуру (IN-RCPY)= -2%: це відповідає імпульсу 0.5s на виході LOWER, враховуючи попередній імпульс 0.5s, загальна тривалість імпульсу 1s, тобто на виході LOWER=TRUE протягом одної секунди.
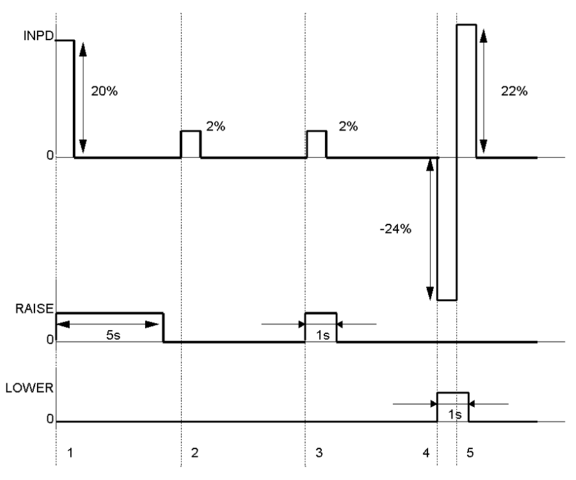
Рис.6.30. Приклад діаграми роботи блоку SERVO без зворотного зв’язку по положенню ВМ
Розглянемо роботу SERVO без використання зворотного зв’язку по положенню, тобто при en_rcpy=FALSE (рис.6.30). У цьому прикладі використовуються такі настройки: t_motor=t#25s, t_mini=t#1s, контур працює в ручному режимі (MA_I=FALSE). На діаграмі цифрами мітками позначені наступні ситуації.
-
При INPD=+20%: на виході RAISE генерується імпульс тривалістю 5s (=20% від 25s);
-
При появі значення INPD=+2%: це відповідає імпульсу 0.5s на виході RAISE, однак оскільки це менше ніж t_mini, то вихід RAISE =FALSE; тривалість 0.5s для RAISE залишається збереженим до наступного перерахунку;
-
При появі значення INPD=+2%: це відповідає імпульсу 0.5s на виході RAISE, враховуючи попередній імпульс 0.5s, загальна тривалість імпульсу 1s, тобто на виході RAISE=TRUE протягом одної секунди;
-
При появі значення INPD= -24%: це відповідає імпульсу 6s на виході LOWER;
-
Перед закінченням наступної секунди наступна модифікація INPD=+22%: загальна модифікація = -24%+22%=-2%, це менше ніж мінімальний імпульс (4%), тому вихід LOWER=FALSE.
Приклад використання блоку SERVO показаний в параграфі 6.8.3.
6.4.2. Управління виконавчими механізмами з використанням широтно-імпульсного перетворення PWM1
Функціональний блок PWM1 призначений для перетворення числового значення на вході блоку IN в 2 дискретні сигнали OUT_POS та OUT_NEG з певною шириною та частотою імпульсу (рис.6.31).
Ініціалізація блоку обов’язково повинна проводитись при першому циклі ПЛК!
Весь час ділиться на періоди з тривалістю t_period (рис.6.32). У залежності від значення входу IN, на кожному періоді формується сигнал OUT_POS (при IN>0) або OUT_MIN (при OUT<0) з тривалістю T_on. Залежність T_on від значення IN описується формулами (6.38)-(6.39), та графічно показана на рис.6.33.

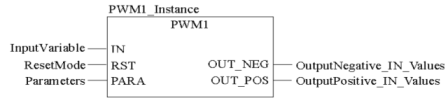
Рис.6.31. Приклад виклику блоку PWM1
У таблиці 6.25 та 6.26 наведені параметри блоку PWM1.
Таблиця 6.25 Параметри блоку PWM1
| Вхідні параметри | |||
|---|---|---|---|
| IN | REAL | Вхідна змінна | |
| RST | BOOL | 1 = Скинути блок | |
| PARA | Para_PWM1 | Параметри | |
| Вихідні параметри | |||
| OUT_NEG | BOOL | Вихід для від’ємного значення IN | |
| OUT_POS | BOOL | Вихід для додатного значення IN | |
Таблиця 6.26 Опис структурного типу Para_PWM1
| t_period | TIME | Довжина (тривалість) періоду |
| t_min | TIME | Мінімальний час імпульсу |
| in_max | REAL | обмеження по максимуму (по модулю) значення IN |
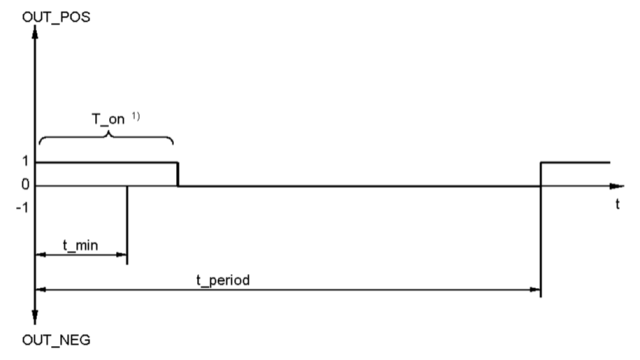
Рис.6.32. Діаграма зміни виходів блоку PWM1
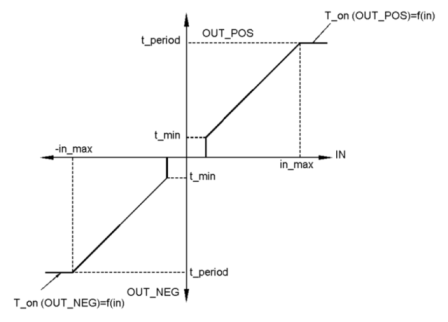
Рис.6.33. Статична характеристика t_period(IN) для PWM1
Параметр t_min вказує мінімальну тривалість імпульсу. Тобто якщо розрахований час T_on за (6.38) та (6.39) буде менше часу t_min, то імпульс на даному періоді формуватися не буде.
При команді RST=1 всі виходи блоку скидаються в FALSE, а блок починає відраховувати час з моменту, коли RST=0.
Якщо блок PWM1 обробляє вихід регуляторів PI_B/PIDFF, то рекомендується t_period виставляти рівним часу виклику блоку регулятору. Це гарантує, що кожний новий сигнал на ВМ з регулятора буде оброблений блоком PWM1. Час періоду виклику самого PWM1 рекомендується виставляти як мінімум в 10 раз менше ніж час періоду t_period.
Блок PWM1 може використовуватися для управління двигуном, швидкість якого керується шириною імпульсу OUT_POS в один бік, і OUT_NEG в інший бік. Іншим прикладом виконавчого механізму є ТЕН (трубчатий електронагрівач), однак при цьому буде використовуватись тільки вихід OUT_POS.
Приклад діаграми роботи PWM1 з настройками t_period=t#4s, t_min=t#0.5s, in_max=10 показаний на рис.6.34.
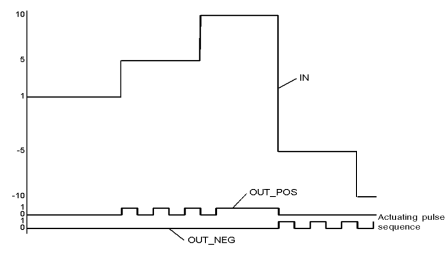
Рис.6.34. Приклад діаграми роботи PWM1
6.4.3. Блок ручного управління MS
Функціональні блоки регуляторів, в тому числі PI_B/PIDFF, мають вбудовані засоби переключення їх в ручний режим, з забезпеченням безперебійності. Нижче наведені випадки, для яких може знадобитися використання блоку ручного управління MS:
-
для управління аналоговими виходами, які управляються НЕ через алгоритми зі зворотним зв’язком (не за відхиленням);
-
для управління аналоговими виходами, які в ручному і в автоматичному режимах формуються окремими блоками (наприклад при каскадному регулюванні, переключенні між алгоритмами);
-
для управління серводвигунами в ручному режимі без використання регуляторів PI_B/PIDFF;
На рис.6.35 показана функціональна схема блоку MS, на рис.6.36 – приклад виклику блоку в FBD.
Вихід OUT в автоматичному режимі формується як сума входів IN та outbias, якщо зміщення активоване (use_bias=TRUE). У ручному режимі вихід міняється безпосередньо. У обидвох режимах абсолютне значення OUT обмежується по мінімуму і максимуму, а інкрементальне OUTD – не обмежується.
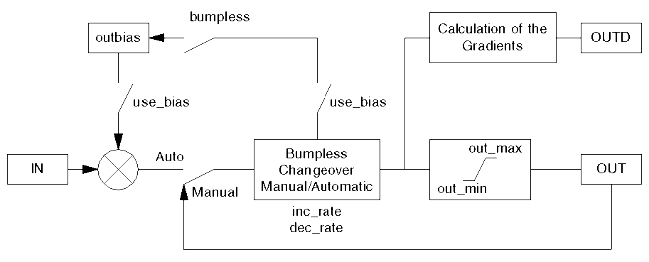
Рис.6.35.Функціональна схема блоку MS
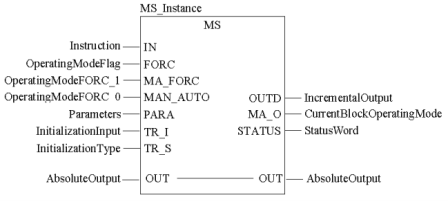
Рис.6.36.Приклад виклику блоку MS
Таблиця 6.27 Параметри блоку MS
| Вхідні параметри | ||
|---|---|---|
| IN | REAL | Значення змінної в автоматичному режимі |
| FORC | BOOL | 1:Режим ручний/автомат визначається входом MA_FORC 0: Режим ручний/автомат визначається входом MAN_AUTO |
| MA_FORC | BOOL | Режим ручний/автомат для FORC = 1 1: Автоматичний режим 0: Ручний режим |
| MAN_AUTO | BOOL | Режим ручний/автмат для FORC = 0 1: Автоматичний режим 0: Ручний режим |
| PARA | Para_MS | Параметр |
| TR_I | REAL | Вхід ініціалізації |
| TR_S | BOOL | Команда на включення ініціалізації (1: Включити вхід ініціалізації) |
| Вхідні/вихідні параметри | ||
| OUT | REAL | абсолютне значення виходу |
| Вихідні параметри | ||
| OUTD | REAL | інкрементальне значення виходу: різниця між вихідною величиною в плинному і попередньому циклах перерахунку OUTD |
| MA_O | BOOL | Плинний режим роботи регулятору (0: Ручний, 1: Автоматичний) |
| STATUS | WORD | Слово статусу |
Таблиця 6.28. Опис структурного типу Para_MS
| out_min | REAL | нижня межа для виходу регулятору |
|---|---|---|
| out_max | REAL | верхня межа для виходу регулятору |
| inc_rate | REAL | Швидкість наростання значення сигналу при переключенні руч./авт. (одиниць на секунду) |
| dec_rate | REAL | Швидкість спадання значення сигналу при переключенні руч./авт. (одиниць на секунду) |
| outbias | REAL | значення зміщення |
| use_bias | BOOL | 1: Активувати зміщення |
| bumpless | BOOL | 1: активувати безударність переходу руч/авт |
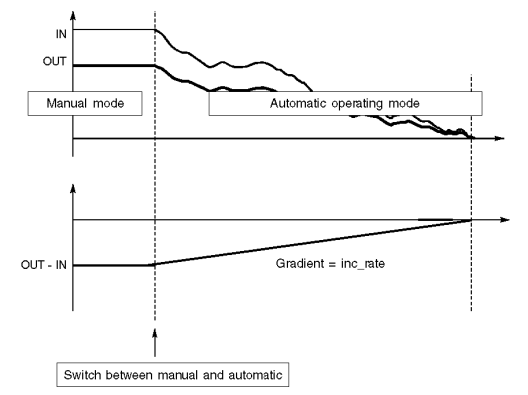
Рис.6.37.Діаграма роботи безударного переходу руч./авт. в MS
Для реалізації безударності переходу з ручного в автоматичний режим (bumpless=TRUE) використовуються лінійні переходи з обмеженням по швидкості, які настроюються параметрами inc_rate та dec_rate. Таким чином, в момент переходу в автоматичний режим, різниця між IN та OUT буде зменшуватися відповідно до заданої швидкості (рис.6.37).
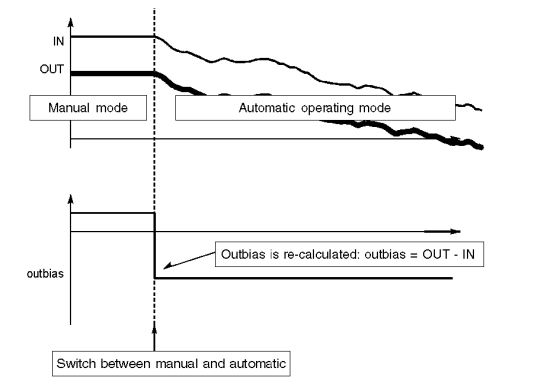
Рис.6.38.Діаграма роботи безударного переходу руч./авт. зі зміщенням в MS
Якщо активований параметр outbias (зміщення) тобто use_bias=TRUE, то безударність досягається за рахунок використання нового перерахованого значення зміщення (рис.6.38).
Безударний перехід є сенс активувати тоді, коли вхід IN підключений до регуляторів або інших блоків, в яких не реалізований безударний перехід. Приклад використання блоку MS показаний в параграфі 6.8.2.