6.5. Організація управління уставками (сімейство Setpoint Management)
6.5.1. Перемикач уставок SP_SEL
Функціональний блок призначений для переключення уставки (заданого значення SP) для регуляторів PI_B/PIDFF або аналогічних (див. рис.6.39). У локальному режимі (local mode, коли SP_RSP=FALSE) уставка змінюється безпосередньо через вхід/вихід SP, який повинен бути підключений до однойменного входу регулятору. У дистанційному режимі (remote mode, коли SP_RSP=TRUE) уставка змінюється через вхід RSP.
Функціональний блок має наступні властивості:
1) переключення між уставками в безударному режимі;
2) операції з уставками проводяться навіть в ручному режимі;
3) проводиться обмеження уставки по верхній і нижній межі;
При переключенні уставки з локального режиму в дистанційний, безударність забезпечується за рахунок плавної зміни виходу з швидкістю, заданою параметром rate.
Приклад використання SP_SEL показаний в параграфі 6.8.2.
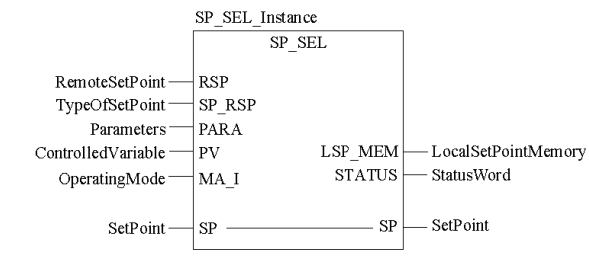
Рис.6.39. Приклад виклику блоку SP_SEL
Таблиця 6.29. Параметри блоку SP_SEL
| Вхідні параметри | ||
|---|---|---|
| RSP | REAL | Дистанційна уставка |
| SP_RSP | BOOL | Вибір уставки 1 : Дистанційна уставка 0 : Локальна уставка |
| PARA | Para_SP_SEL | Параметри |
| PV | REAL | Плинне значення змінної управління |
| MA_I | BOOL | Операційний режим регулятору, до якого під’єднаний перемикач 1 : Автоматичний режим 0 : Ручний режим |
| Вхідні/вихідні параметри | ||
| SP | REAL | Уставка регулятору |
| Вихідні параметри | ||
| LSP_MEM | REAL | Локальна уставка в пам’яті |
| STATUS | WORD | Слово статусу |
Таблиця 6.30 Опис структурного типу Para_SP_SEL
| sp_min | REAL | Обмеження по мінімуму уставки |
| sp_max | REAL | Обмеження по максимуму уставки |
| bump | BOOL | У процесі зміни уставки локальної/дстанційної 1 : вихід SP форсується значенням LSP_MEM 0: безударний перехід |
| track | BOOL | 1 : значення SP копіюється зі входу PV (тільки в локальному режимі) |
| rate | REAL | швидкість збільшення SP протягом зімни локальне/дистанційне в одиницю/секунду (≥0) |
6.5.2. Зміна уставки з постійною швидкістю (RAMP)
Функціональний блок RAMP забезпечує плавну зміну виходу SP від попереднього значення до значення входу RSP (див. рис.6.40). Швидкість зміни налаштовується двома параметрами з Para_RAMP: на збільшення – inc_rate, на зменшення - dec_rate. Рівність SP=RSP сигналізується виходом DONE.
Блок RAMP може бути використаний для плавної зміни завдання або виходу регулятору, створеного користувачем.
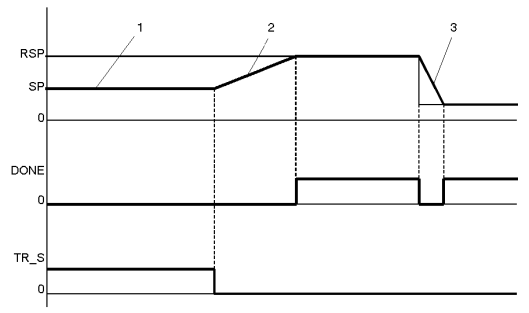
Рис.6.40. Приклад виклику блоку RAMP
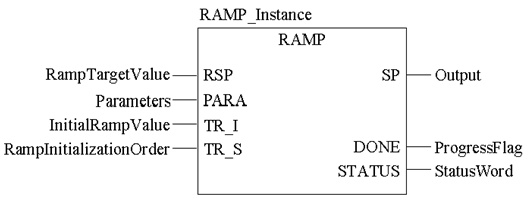
Рис.6.41. Приклад виклику блоку RAMP
Таблиця 6.31. Параметри блоку RAMP
| Вхідні параметри | ||
|---|---|---|
| RSP | REAL | Задане значення уставки |
| PARA | Para_RAMP | Параметри |
| TR_I | REAL | Значення ініціалізації |
| TR_S | BOOL | 1 – включити ініціалізацію |
| Вихідні параметри | ||
| SP | REAL | Вихідна уставка |
| DONE | BOOL | 1: значення досягнуло уставки |
| STATUS | WORD | Слово стану |
Таблиця 6.32 Опис структурного типу Para_RAMP
| inc_rate | REAL | Швидкість нарощування в одиницях/секунду (≥0) |
|---|---|---|
| dec_rate | REAL | Швидкість спаду в одиницях/секунду(≥0) |
6.5.3. Задатчик співвідношення (RATIO)
Функціональний блок RATIO забезпечує розрахунок завдання на виході за формулою:
 (6.40)
(6.40)
де PV_TRACK – значення змінної, відносно якої розраховується завдання; bias – зміщення.
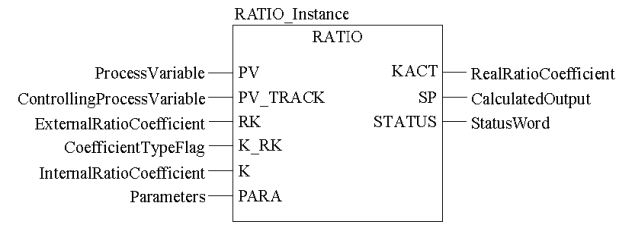
Рис.6.42. Приклад виклику блоку RATIO
Таблиця 6.33 Параметри блоку RATIO
| Вхідні параметри | ||
|---|---|---|
| PV | REAL | Значення вимірювальної величини, що подається на регулятор (тільки для розрахунку KACT) |
| PV_TRACK | REAL | значення змінної, відносно якої розраховується завдання |
| RK | REAL | дистанційний коефіцієнт співвідношення |
| K_RK | BOOL | Вибір джерела для коефіцієнта: “1”: коефіцієнт задається дистанційно входом RK “0”: локальний коефіцієнт, задається входом K |
| K | REAL | локальний коефіцієнт співвідношення |
| PARA | Para_RATIO | Пареметри |
| Вихідні параметри | ||
| KACT | REAL | Реальний коефіцієнт співвідношення |
| SP | REAL | Розраховане завдання |
| STATUS | WORD | Слово стану |
Таблиця 6.34 Опис структурного типу Para_RATIO
| k_min | REAL | обмеження по мінімуму K та RK |
| k_max | REAL | обмеження по максимуму K та RK |
| sp_min | REAL | обмеження по мінімуму для розрахованого SP |
| sp_max | REAL | обмеження по максимуму для розрахованого SP |
| bias | REAL | Зміщення |
Функціональний блок може бути використаний при слідкуючому регулюванні (наприклад регулятор співвідношення) для формування завдання регуляторам PI_B/PIDFF.
Крім реалізації лінійної залежності, блок має додаткові можливості (рис.6.43):
-
дистанційну зміну коефіцієнту K або RK;
-
обмеження по мінімуму та максимуму для K або RK;
-
обмеження по мінімуму та максимуму для розрахованого SP;
-
розрахунок реального коефіцієнта: KACT=(PV-bias)/PV_TRACK;
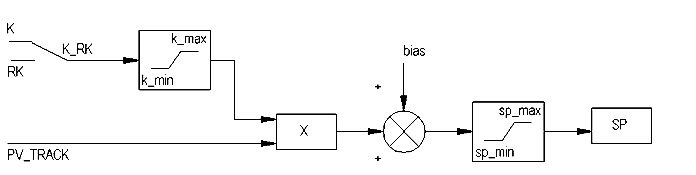
Рис.6.43. Функціональна схема RATIO