6.7. Цілочисельне регулювання (сімейство CLC_INT)
6.7.1. Огляд процедур цілочисельного регулювання
Процедури UNITY PRO для цілочисельного регулювання PID_INT, PWM_INT та SERVO_INT аналогічні функціям PID, PWM та SERVO, які використовувалися в PL7 PRO при програмуванні попередніх версій TSX Premium та TSX Micro. Дані процедури як правило використовують тільки для сумісності з конвертованими проектами з PL7, однак використання їх в нових проектах UNITY PRO також дозволяється. Альтернативою процедурам цілочисельного регулювання є більш потужні функціональні блоки бібліотеки управління, які наведені вище.
Структурна схема можливих варіантів контуру з цілочисельним ПІД-регулятором представлена на рис.6.50.
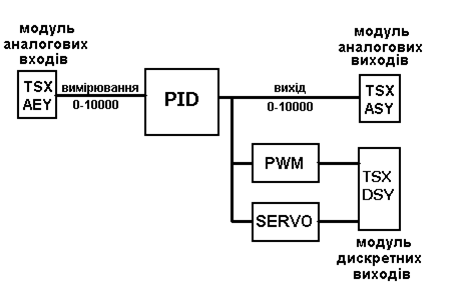
Рис.6.50. Структурна схема варіантів реалізації контуру з ПІД-регулятором
До структурної схеми можуть входити три процедури:
-
блок ПІД-регулятора (процедура PID_INT);
-
блок широтно-імпульсного перетворення (PWM_INT);
-
блок управління реверсивним двигуном (SERVO_INT).
При використанні аналогового виконавчого механізму, цілочисельний вихід блока ПІД подається на аналоговий вихід контролера. Якщо використовується електричний виконавчий механізм з постійною швидкістю обертання (наприклад виконавчий механізм типу МЕО) або крокові двигуни, цілочиселний вихід PID_INT за допомогою процедур PWM_INT або SERVO_INT перетворюється у послідовність імпульсів, які подаються на дискретні виходи. Для правильного функціонування процедур PID_INT, PWM_INT та SERVO_INT Задача, в якій вони викликаються повинна виконуватись у періодичному режимі!
6.7.2. Процедура PID_INT
Процедура PID_INT призначена для реалізації цілочисленьного ПІД-регулятора. Внутрішня структура процедури показана на рис.6.51, приклад виклику в програмі на мові FBD на рис.6.52, параметри PARA в таблиці 6.38. Слід звернути увагу на те, що цілочисельне регулювання базується на цілочисельній арифметиці, отже всі вхідні та вихідні значення являються типами INT, BOOL та DINT. Для кращого розуміння можна представити що регулювання відбувається у відсоткових діапазонах, де 0% - це 0, а 100% - це 10000.
Задане значення SP (Setpoint), яке подається на вхід регулятора, попередньо обмежується в діапазоні 0-10000 (0-100%). У середині процедури розраховується розузгодження ε=SP-PV, де PV (Process value) – вимірювальна величина. Розузгодження поступає на блок PID, де безпосередньо реалізований сам алгоритм ПІД-регулятора.
Настройки регулятора проводиться через параметри: КP – коефіцієнт пропорційності, ТI – постійна часу інтегрування, TD – постійна часу диференціювання. Диференційна складова може працювати в режимі диференціювання, розузгодження або вимірювальної величини. Вибір режиму проводиться параметром PV_DEV.
Вихід регулятора обмежується значеннями OUT_MIN та OUT_MAX, які теж є параметрами настройки регулятора. Після обмежувача виходу (Limiter) в автоматичному режимі (AUTO=1), це значення поступає на вихід OUTР. У ручному режимі роботи регулятора (AUTO=0), значення виходу береться зі входу OUT_MAN (ручне завдання).
Для безударності переходу з автоматичного у ручний режим, в ручному режимі вихід блоку PID (див. рис.6.51) повторює значення OUT_MAN. Включення/виключення безударного режиму проводиться через параметр NO_BUMP.
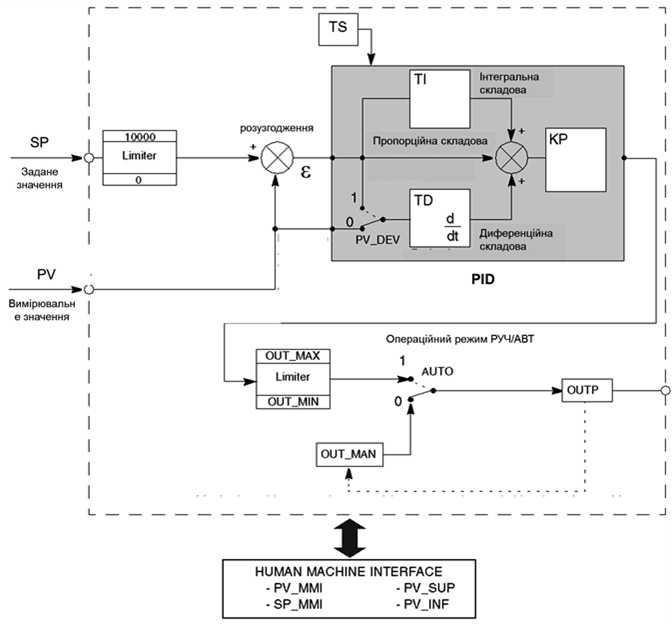
Рис.6.51. Внутрішня структура процедури PID_INT
Розрахунок виходу блоку PID залежить від настройок KP, TI, TD та режиму PV_DEV. Якщо TI>0 та TD>0, вихід розраховується за формулами:
 (6.45)
(6.45)
при цьому в залежності від вибраного режиму диференціювання:
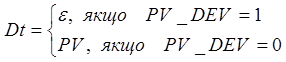 (6.46)
(6.46)
Індекс “i-1” в формулі (6.45) означає, що береться значення з попереднього виклику процедури. Коефіцієнти в процедурі PID_INT є цілочисельними значеннями, тому задаються наступним чином:
-
KP в 0.01, тобто якщо необхідно задати коефіцієнт пропорційності 1.56, тоді KP=156;
-
TI в 0.1 с, тобто якщо необхідно задати 100 с, то TI =1000;
-
TD в 0.1 с, тобто якщо необхідно задати 120 с, то TD =1200;
За допомогою параметра TS задається періодичність обробки процедури PID_INT в 0.01 с. Тобто ПІД регулятор може бути викликаний один раз на декілька циклів, що може заощадити часові ресурси процесора. Слід зазначити, що дійсна періодичність обробки буде кратною періоду Задачі.
Якщо TI=0 та TD=0, регулятор працює в П-режимі, тобто без інтегральної та диференційної складової. Можливий також варіант, коли TI=0, а TD>0, тобто регулятор працює в режимі ПД. Розрахунок виходу регулятору в П-режимі буде проводитись по формулі:
 (6.47)
(6.47)
Значення 5000 береться з розрахунку, що нормальне положення виконавчого механізму є 50% від діапазону.
Використання даної процедури в контролерах TSX Micro, передбачало можливість настройки регуляторів в операторських панелях CCX-17. Тому для них в PID_INT були виділені спеціальні настройки. Враховуючи, дуже малу ймовірність використання знятих з виробництва CCX-17 з новими ПЛК Modicon, ці настройки коментувати не будемо.
На рис.6.52 показаний програмний інтерфейс процедури. Входи TAG (назва контуру) та UNIT(одиниці вимірювання) типу STRING використовуються для сумісності з старими панелями CCX-17 і можуть бути не задіяні.
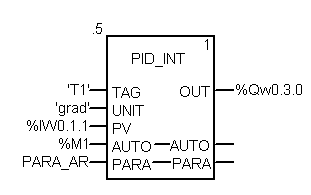
Рис.6.52. Приклад виклику процедури PID_INT в FBD
З усіх змінних та параметрів процедури в інтерфейс явно виведені тільки PV (вимірювальна величина), AUTO (перемикач руч/авт) та OUT(вихід регулятору). Всі інші параметри задаються через масив PARA типу INT, який завжди має довжину 43 елементи. У прикладі рис.6.52 фактичним параметром PARA є змінна-масив PARA_AR, об’явлений як ARRAY[0..42] of INT. Крім параметрів регулятора, масив використовується для збереження проміжних результатів розрахунку, наприклад значення OUTi-1 з (3.3).
Таблиця 6.38 Таблиця параметрів (PARA) процедури PID_INT
| Елемент масиву | Позначення | Призначення |
|---|---|---|
| PARA[0] | SP | Значення завдання (0-10000) |
| PARA[1] | OUT_MAN | Значення вихідної величини у ручному режимі (0-10000) |
| PARA[2] | KP | Коеф. пропорційності (в 0.1 долях) (-10000<KP<10000) |
| PARA[3] | TI | Пост.часу інт. (в 0.1 c) (0-20000) |
| PARA[4] | TD | Пост.часу диф. (в 0.1 c) (0-20000) |
| PARA[5] | TS | Дискретність обробки ( в 0.01 c) (1-32000) |
| PARA[6] | OUT_MAX | Обмеження виходу по максимуму (0-10000) |
| PARA[7] | OUT_MIN | Обмеження виходу по мінімуму (0-10000) |
| PARA[8].0 | PV_DEV | вибір режиму диференціювання: 0-PV, 1- SP-PV |
| PARA[8].4 | NO_BUMP | ВКЛ/ВИКЛ режиму безударності: 0-ВИКЛ, 1-ВКЛ |
| PARA[8].8 | DEVAL_MMI | заборона використання ММІ |
| PARA[9]- PARA[16] | _MMI* | параметри тільки для операторських панелей CCX-17 |
| PARA[18]- PARA[42] | дані для збереження проміжних результатів |
6.7.3. Процедура SERVO_INT
Коли у якості виконавчого механізму використовуються реверсивні двигуни з постійною швидкістю обертання (типу МЕК, МЕО), які управляються двома дискретними сигналами “більше” та “менше”, вихід з аналогового ПІД-регулятора (OUT PID_INT) необхідно обробити процедурою SERVO_INT (рис.6.53).
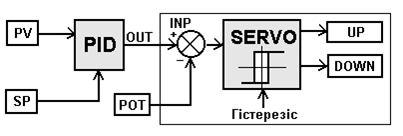
Рис.6.53. Структура контуру управління ВМ типу МЕО/МЕК
Процедура SERVO_INT завжди використовується разом з PID_INT, та зчитує її внутрішні дані. Тому, крім виходу OUT з PID_INT використовується також таблиця параметрів PARA. Приклад використання процедури SERVO_INT разом з PID_INT показаний на рис.6.54.
Вихід OUT з PID_INT подається на вхід INP процедури SERVO_INT. У вхідному параметрі POT (типу INT) зберігається значення сигналу від датчика положення виконавчого механізму (сигнал зворотного зв‘язку). Якщо зворотній зв’язок не використовується, на віх POT подають -10000.
Вихід UP відповідає сигналу “більше”, а DOWN – “менше”. На вхід PID завжди подається той самий масив, який використовується в якості фактичного параметра PARA регулятора PID_INT. PARA – масив параметрів процедури SERVO_INT із 9 елементів типу INT.
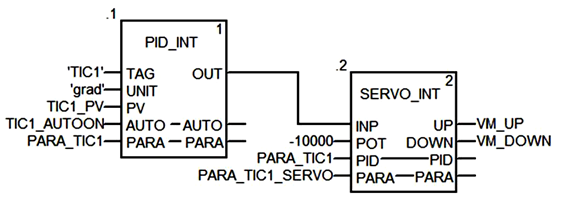
Рис.6.54. Приклад виклику процедури SERVO_INT разом з PID_INT без зворотного зв’язку по положенню РО
Таблиця 6.39. Таблиця параметрів (PARA) процедури SERVO_INT
| Елемент масиву | Позначення | Призначення |
|---|---|---|
| PARA[0] | T_MOTOR | Час повного відкриття регулюючого органу (в 0.01 c) |
| PARA[1] | T_MINI | Мінімальна тривалість імпульсу (в 0.01 c) |
| PARA[2] | HYST | Значення гістерезису (0-10000) |
| PARA[3]- PARA[8] | дані для збереження проміжних результатів |
Для правильної роботи SERVO_INT, необхідно вказати час переміщення регулюючого органу з однієї крайньої позиції (наприклад “закритий”) в іншу крайню позицію (“відкритий”). Цей час задається в 0.01 с, тобто час повного ходу 25с записується як T_MOTOR:=2500. Крім того задається мінімальний час імпульсу T_MINI теж в 0.01 с.
У випадку відсутності зворотного зв’язку по положенню регулюючого органу, SERVO_INT буде працювати наступним чином. Алгоритм отримує на вході відхилення виходу PID (з PARA алгоритму PID_INT) і перетворює його в період імпульсу згідно формули:
T_IMP = OUT * T_MOTOR/1000* мс, (6.48)
Необхідний для цієї процедури час добавляється до періоду, що залишився від попередніх циклів. Тобто те, що не було “спожито” в робочому циклі, зберігається для наступних циклів.
Припустимо, що T_MOTOR=2500 (25 с), а T_MINI=1000 (1 с). Тоді роботу процедури можна описати діаграмою, яка зображена на рис.6.55.
На діаграмі цифрами-мітками позначені наступні ситуації:
1 – відхилення виходу PID_INT=+20%: враховуючи, що повний хід РО є 25 с, сформується імпульс на виході UP протягом 5 с;
2 – відхилення виходу від попереднього значення PID_INT=+2%, що відповідає імпульсу 0.5 с: цей імпульс менше ніж T_MINI (=1 c), тому не впливає на виходи;
3 – з’являється ще одне відхилення на +2%: процедура добавляє це відхилення до попереднього (яке відповідає відхиленню, менше мінімального значення), що відповідає загальному додатному відхиленню на +4%, і імпульсу тривалістю 1 с на виході UP;
4 – з’являється відхилення на -24%: це відповідає імпульсу тривалістю 6 с на виході DOWN;
5 – перед закінченням наступної секунди інше відхилення на +22% повертає систему знову до глобального відхилення на 2% < відхилення T_MINI (4%): процедура закінчує виконання мінімального імпульсу DOWN тривалістю в 1 с.
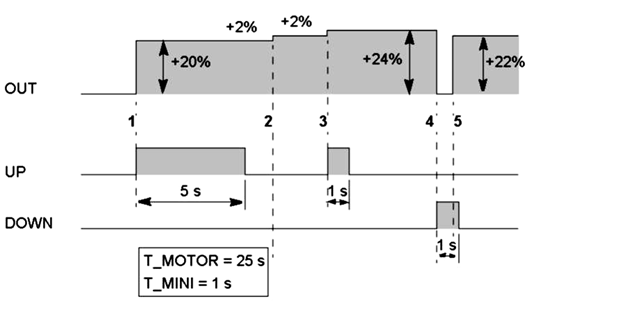
Рис.6.55. Приклад роботи процедури SERVO_INT без зворотного зв’язку по положенню регулюючого органу
6.7.4. Процедура PWM_INT
Якщо у якості виконавчого механізму використовується кроковий двигун або трубчатий електронагрівач (ТЕН), то після процедури PID_INT використовується блок широтно-імпульсного модулятора PWM_INT, структура якого наведена на рис.6.56.
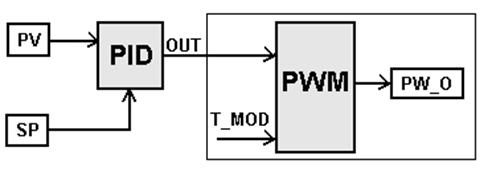
Рис.6.56. Структура контуру управління з широтно-імпульсною модуляцією
Приклад використання показаний на рис.6.57. Параметр INP – вхід блоку, на який подається вихід регулятора PID_INT; PW_O – дискретний модульований вихід; PARA – масив параметрів типу INT із 5 елементів:
Таблиця 6.40 Таблиця параметрів (PARA) процедури PWM_INT
| Елемент масиву | Позначення | Призначення |
|---|---|---|
| PARA[0] | T_MOD | Період модуляції (в 0.01 c) (0-32767) |
| PARA[1]- PARA[4] | дані для збереження проміжних результатів |
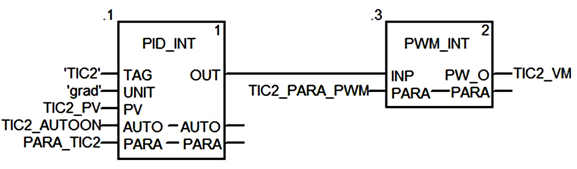
Рис.6.57. Приклад виклику процедури PWM_INT разом з PID_INT
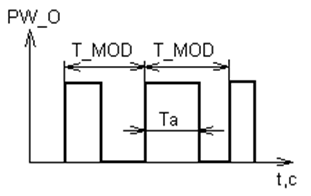
Рис.6.58 Широтно-імпульсна модуляція
Першим параметром цієї таблиці є слово, в якому зберігається значення періоду модуляції T_MOD. Період модуляції повинен бути меншим або дорівнювати періоду дискретизації ПІД-регулятора (TS). T_MOD може змінюватись у межах від 0 до 32767 і вимірюється у 0,01 секунди. Тривалість імпульсу залежить від значення вхідної величини INP і періоду модуляції T_MOD:
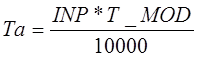 (6.49)
(6.49)