6.3.7. Фільтр ковзного середнього з коректором AVGMV_K (сімейство Measurement)
Функціональний блок AVGMV_K реалізовує алгоритм розрахунку фільтру ковзного середнього з коректором К по формулі (6.28).
 (6.28)
(6.28)
де X – вхідне не фільтроване значення, Y – середнє вихідне (фільтроване) значення, Yold - значення виходу на попередньому виклику, K - коректор.
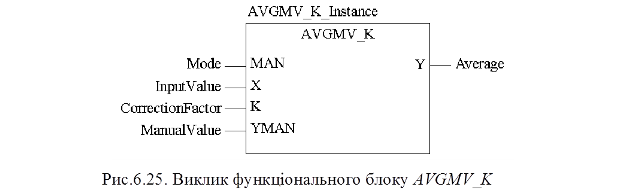
Таблиця 6.18. Параметри блоку AVGMV_K.
| Вхідні параметри | ||
|---|---|---|
| MAN | BOOL | 0 = Автоматичний режим; 1 = Ручний режим |
| X | REAL | Вхід |
| K | INT | Коректор (макс 10000) |
| YMAN | REAL | Ручне значення |
| Вихідні параметри | ||
| Y | REAL | Середнє значення |