PACFramework
Клас AOVAR: аналогова вихідна змінна процесу
CLSID=16#1040
Загальний опис
Клас реалізовує функції оброблення перетворення та запису сирих вихідних аналогових даних та діагностичної інформації з AОCH. До цих функцій входить масштабування, керування форсуванням та імітацією.
Якщо мають бути відмінності в реалізації, слід використовувати інші CLSID в форматі 16#104x
Загальні вимоги до функцій AOVAR
Функціональні вимоги
Режими роботи
Клас AОVAR повинен підтримувати наступні режими (підрежими):
- запис виходу/імітація
- нефорсований/форсований
У будь якому режимі, окрім режиму імітації, значення до прив’язаного каналу AOCH записується з AОVAR.VRAW.
Нормальний режим роботи екземпляру класу є комбінацією підрежимів “запис виходу” та “нефорсований режим”. У цьому режимі значення AОVAR.VAL записується до сирого значення каналу AОVAR.VRAW, проходячи через функції оброблення такі як масштабування.
У режимі імітація STA.SML=TRUE значення AОVAR.VAL не проходить функцій обробки та не записує своє значення в AОVAR.VRAW. Іншими словами AОVAR.VAL не має ніякого впливу на фізичний вихід. У режимі імітація також змінюється стан STA.SML каналу, що прив’язаний до змінної.
У режимі форсування (STA.FRC=TRUE) AOVAR.VAL змінюється тільки через налагоджувальні вікна HMI і має найвищий пріоритет і в такому випадку результат виконання програми користувача не має ніякого впливу на AOVAR.VAL. При активності біту форсування лічильник PLC_CFG.CNTFRC збільшується на 1.
Для **мережних ** змінних, які виділяються в окремий клас, доступний режим коли джерело даних записується наззовні і не проходить функцій обробки. Даний режим активується параметром AОVAR.PRM.NORAW
Фільтрація сигналу
Фільтрація реалізована за допомогою функції A_FLTR. Для фільтрації використовується часовий фільтр - аперіодична ланка 1-го порядку. Час фільтрації задається параметром AOVAR.T_FLTякий задається в мс. Також для роботи даного фільтра необхідно передавати значення часу який пройшов з попереднього виклику даної функції dt, і зберігати значення на попередньому циклі обробки, яке зберігається в AOVAR.VALPREV.
Масштабування сигналу
Фільтрація реалізована за допомогою функції SCALING. Робота даної функції обмежена лише режимом :
- лінійна залежність (для усіх)
Для лінійного масштабування використовується сире (не масштабоване) значення з AOVAR.VRAW, діапазон вхідного сигналу (LORAW, HIRAW), діапазон вихідного сигналу (LOENG, HIENG).
Практика використання каркасу показала, що у випадку відображення на HMI змінних у вигляді стовпчика, бажано використовувати відсоткове значення, а не абсолютне (інженерне). Це пов’язано з тим, що каркас передбачає можливість зміни діапазону значення, отже MIN і MAX шкали при цьому теж зміниться. Щоб не зберігати інженерні MIN і MAX в SCADA/HMI, можна прив’язатись до відсоткового значення, яке буде змінюватися за зміни діапазону шкали. Таким чином, в засобах відображення які потребують абсолютних діапазонів (зазначені технологічними показниками) будуть використовуватися абсолютні значення (VAL), а де необхідні значення відносно шкали – відсоткові (VALPROC). Наявність VALPROC в структурі HMI збільшує кількість тегів SCADA/HMI, тому його використання повинно бути виправданим.
Моніторинг прив’язки до каналу
Значення STA.DLNK=TRUE вказує на факт прив’язки до каналу.
Активність змінної
Параметр активності змінної визначається виразом STA.ENBL = NOT PRM.DSBL AND DLNK. Якщо змінна неактивна STA.ENBL=FALSE не працюють функції:
- запису сигналу на фізичний вихід та його маштабування
- імітування
- діагностування та обробка тривог
Верхні рівні ієрархії керування, зокрема CM LVL2, повинні сприймати цю змінну як тимчасово неіснуючу (виведену з експлуатації). Наприклад, якщо змінна відповідає за позиціонер клапану, то CM клапану вважає, що змінної не існує і може працювати за алгоритмом “без аналогового керування”.
Діагностування каналу вимірювання
Класом передбачається перевірка достовірності каналу вимірювання. При PRM.QALENBL=TRUE значення STA.BAD прямо залежить від значення STA.BAD прив’язаного каналу. Інший спосіб діагностування вимірювального каналу не передбачений даним класом змінної.
STA.BAD - це тривога недостовірності. При виникненні тривоги (по передньому фронту) PLC_CFG.NWBAD=TRUE. Поки тривога STA.BAD активна:
- виставляється відповідний біт
PLC_CFG.BAD - збільшується на 1 лічильник
PLC_CFG.CNTBAD
Скидання біту PRM.QALENBL=FALSE відключає функцію перевірки тривоги недостовірності.
Рекомендації щодо використання в HMI
Приклад налаштування функцій аналогових вихідних змінних на HMI наведений на рис.
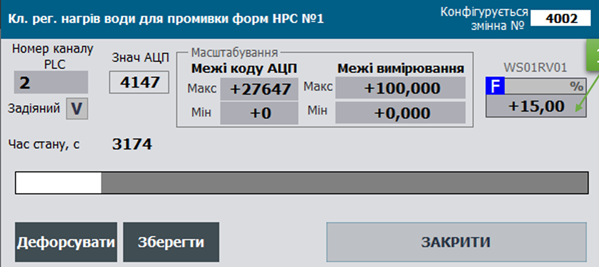
Рис. Приклад налаштування функцій аналогових вихідних змінних на HMI.
Загальні вимоги щодо структури змінних класів
AOVAR_HMI
| name | type | adr | bit | descr |
|---|---|---|---|---|
| STA | INT | 0 | стани + біт команди завантаження AOVAR_STA | |
| VALPROC | INT | 1 | значення у % від шкали вимірювання (0-10000) | |
| VAL | REAL | 2 | масштабоване значення |
AOVAR_CFG
| name | type | adr | bit | descr |
| ————- | —– | —- | —- | ———————————————————— |
| ID | UINT | 0 | | Унікальний ідентифікатор |
| CLSID | UINT | 1 | | 16#1040 |
| STA | UINT | 2 | | статус, призначення біт як AOVAR_STA може бути задіяна як аналогічна структура |
| STA_b0 | BOOL | 2 | 0 | резерв |
| STA_b1 | BOOL | 2 | 1 | резерв |
| STA_BAD | BOOL | 2 | 2 | =1 – Дані недостовірні |
| STA_ALDIS | BOOL | 2 | 3 | =1 – Тривога виведена з експлуатації |
| STA_DLNK | BOOL | 2 | 4 | =1 – якщо прив’язаний до каналу |
| STA_ENBL | BOOL | 2 | 5 | =1 – змінна задіяна |
| STA_b6 | BOOL | 2 | 6 | резерв |
| STA_b7 | BOOL | 2 | 7 | резерв |
| STA_b8 | BOOL | 2 | 8 | резерв |
| STA_b9 | BOOL | 2 | 9 | резерв |
| STA_b10 | BOOL | 2 | 10 | резерв |
| STA_b11 | BOOL | 2 | 11 | резерв |
| STA_INBUF | BOOL | 2 | 12 | =1 – змінна в буфері |
| STA_FRC | BOOL | 2 | 13 | =1 – Режим форсування |
| STA_SML | BOOL | 2 | 14 | =1 – змінна в режимі симуляції |
| STA_CMDLOAD | BOOL | 2 | 15 | =1 – команда завантаження в буфер |
| VRAW | INT | 3 | | сирі значення |
| VAL | REAL | 4 | | масштабоване значення |
| VALFRC | REAL | 6 | | зберігає форсоване значення |
| VALPRV | REAL | 8 | | значення на попередньому циклі (для реалізації фільтрації) |
| PRM | UINT | 10 | | параметри конфігурації, повинні зберігатися при відключеному живленні |
| PRM_b0 | BOOL | 10 | 0 | резерв |
| PRM_b1 | BOOL | 10 | 1 | резерв |
| PRM_b2 | BOOL | 10 | 2 | резерв |
| PRM_b3 | BOOL | 10 | 3 | резерв |
| PRM_b4 | BOOL | 10 | 4 | резерв |
| PRM_b5 | BOOL | 10 | 5 | резерв |
| PRM_QALENBL | BOOL | 10 | 6 | =1 – задіяти тривогу недостовірності каналу |
| PRM_DSBL | BOOL | 10 | 7 | =1 – змінна не задіяна |
| PRM_PWLENBL | BOOL | 10 | 8 | =1 – задіяна кусочно-лінійна інтерполяція (не використовувати разом з TOTALON) |
| PRM_b9 | BOOL | 10 | 9 | резерв |
| PRM_b10 | BOOL | 10 | 10 | резерв |
| PRM_b11 | BOOL | 10 | 11 | резерв |
| PRM_b12 | BOOL | 10 | 12 | резерв |
| PRM_b13 | BOOL | 10 | 13 | резерв |
| PRM_STATICMAP | BOOL | 10 | 14 | =1 - статична прив’язка каналів |
| PRM_NORAW | BOOL | 10 | 15 | =1 - джерело даних змінюється ззовні |
| CHID | UINT | 11 | | Логічний номер вихідного аналогового каналу CH |
| LORAW | INT | 12 | | Сире (немасштабоване) значення мінімуму |
| HIRAW | INT | 13 | | Сире (немасштабоване) значення максимуму |
| LOENG | REAL | 14 | | Інженерне (масштабоване) значення мінімуму |
| HIENG | REAL | 16 | | Інженерне (масштабоване) значення максимуму |
| T_FLT | UINT | 17 | | час фільтрації в мілісекундах (фільтр - аперіодична ланка) |
| VALPROC | INT | 18 | | значення у відсотках |
| STEP1 | UINT | 19 | | номер кроку |
| T_STEP1 | UDINT | 20 | | Плинний час кроку в мс |
| T_PREV | UDINT | 22 | | час в мс з попереднього виклику, береться зі структури PLC_CFG.TQMS |
Команди для буферу (див структуру буферу)
| Атрибут | Тип | Опис |
| ——- | —- | ———————————————————— |
| CMD | UINT | Команди:
16#0001: записати максимум діапазону - тільки при форсуванні
16#0002: записати мінімум діапазону - тільки при форсуванні
16#0003: записати середину діапазону - тільки при форсуванні
16#0100: прочитати конфігурацію
16#0101: записати конфігурацію
16#0102: записати значення за замовченням
16#0300: перемкнути форсування
16#0301: ввімкнути форсування
16#0302: вимкнути форсування
16#0311: імітувати
16#0312: зняти режим імітації
|
Робота з буфером
Повинна бути реалізована функція роботи з класичним буфером.
-
Буфер рекомендується використовувати один для всіх технологічних змінних.
-
Факт зайнятості буфера перевіряється за рівністю ідентифікатора класу
CLSIDта ідентифікатора технологічної змінноїID -
при захопленні буферу:
VARBUF.STA = AOVAR_CFG.STAAOVAR_CFG.CMD = VARBUF.CMDякщо той не дорівнює нулю (для можливості команд з іншого джерела)- зчитування статусних бітів фізичного каналу технологічної змінної
VARBUF.CH_STA = CHCFG.STA.
-
конфігурація технологічної змінної повинна зчитуватися в буфер при отриманні команд:
- біті статусу
STA.CMDLOAD=TRUE - оновлення технологічної змінної, яка вже записана в буфер
VARBUF.CMD= 16#0100;
- біті статусу
-
конфігурація технологічної змінної повинна записуватись з буфера при отриманні команд:
VARBUF.CMD= 16#0101;
Повинна бути реалізована функція роботи з параметричними двунаправленим буферами VARBUFIN<->VARBUFOUT.
- Використовується 2 буфери:
- вхідний
VARBUFIN- використовується для обробки команд (при рівності CLSID та ID) та запису інформації в технологічну змінну - вихідний
VARBUFOUT- використовується зчитування інформації з технологічної змінної при отриманні команди на читання зVARBUFIN
- вхідний
- Буфери рекомендується використовувати одну пару для всіх технологічних змінних.
- Факт зайнятості буфера не можливий, оскільки буфер реалізований через 2 буферні змінні VARBUFIN та VARBUFOUT через які інформація проходить для подальшої передачі її в технологічну змінну або внутрішній буфер засобу HMI (по аналогії з параметричним обміном PKW в профілі PROFIDRIVE)
- конфігурація технологічної змінної повинна зчитуватися в вихідний буфер при:
- рівності класів
AOVARCFG.CLSID=VARBUFIN.CLSID, ідентифікаторівAOVARCFG.ID=VARBUFIN.IDта отримання команди з вхідного буфераVARBUFIN.CMD=16#100
- рівності класів
- конфігурація технологічної змінної повинна записуватись з вхідного буфера при:
- рівності класів
AOVARCFG.CLSID=VARBUFIN.CLSID, ідентифікаторівAOVARCFG.ID=VARBUFIN.IDта отримання команди з вхідного буфераVARBUFIN.CMD=16#101
- рівності класів
Вимоги щодо реалізації інтерфейсу
INOUT
CHCFG- фізичний канал прив’язаний до технологічної змінноїAOVARCFG- конфігураційна частина технологічної змінноїAOVARHMI- HMI частина технологічної змінної- за умови, що немає можливості доступатися до зовнішніх змінних з середини функцій, передається
PLC_CFG,VARBUF,VARBUFIN,VARBUFOUT; альтернативно можна використовувати інші інтерфейси для використання в серединіPLC_CFG
Ініціалізація технологічної змінної при першому циклі роботи
Запис ID, CHID, CHIDFL за замовченням виконується в результаті виконання програмної секції initvars.
Для кожної технологічної змінної в initvars повиннен бути наступний фрагмент програми для запису ID, CHID, CHIDFL
"VAR".AOVAR1.ID := 1001; "VAR".AOVAR1.CHID := 1; "VAR".AOVAR1.CHIDDF := 1;
Також виконується ініціалізація всередині функції обробки технологічної змінної, в результаті
- присвоюється
AOVARCFG.CLSID:=16#1040; - виконується активація технологічної змінної
AOVARCFG.PRM.DSBL := FALSE; - якщо логічний номер каналу не заданий - записати значення по замовчування
AOVARCFG.CHID := AOVARCFG.CHIDDF; - виконується активація тривог перевірки якості даних.
Вимоги щодо реалізації програми користувача
- Функції обробки технологічних змінних повинні викликатися з кожним викликом тієї задачі, до якого вони прив’язані.
- При першому старті (
PLC_CFG.SCN1) повинні ініціалізуватися ідентифікатор змінноїAOVAR_CFG.IDта номер логічного каналуAOVAR_CFG.CHID,
(*ініціалізація змінної на першому циклі обробки*)
IF "SYS".PLCCFG.STA.SCN1 THEN
#AOVARCFG.CLSID := 16#1040; (*присвоєння ідентифікатора класу*)
#AOVARCFG.PRM.DSBL := FALSE; (*активація змінної*)
#AOVARCFG.PRM.QALENBL := true; (*активація тривог перевірки якості даних*)
#AOVARCFG.T_PREV := "SYS".PLCCFG.TQMS; (*збереження часу виклику*)
IF #AOVARCFG.CHID = 0 THEN (*якщо логіний номер каналу на заданий - записати значення по замовчування *)
#AOVARCFG.CHID := #AOVARCFG.CHIDDF;
END_IF;
(*запис сирого значення з каналу для подальшої обробки*)
IF #CHCFG.ID > 0 THEN
#CHCFG.VAL := #AOVARCFG.VRAW;
ELSE
#CHCFG.VAL := 0;
END_IF;
#AOVARCFG.T_STEP1 := 0; (*онулення часу кроку*)
#AOVARCFG.STEP1 := 100; (*переведення на крок норми*)
(*визначення діапазонів ідентифікаторів змінної*)
IF #AOVARCFG.ID>0 THEN
IF #AOVARCFG.ID<"SYS".VARIDMIN THEN "SYS".VARIDMIN:=#AOVARCFG.ID; END_IF;
IF #AOVARCFG.ID>"SYS".VARIDMAX THEN "SYS".VARIDMAX:=#AOVARCFG.ID; END_IF;
END_IF;
RETURN;
END_IF;
(*зчитування статусних бітів з технологічної змінної у внутрішні змінні*)
#BAD := #AOVARCFG.STA.BAD;
#ALDIS := #AOVARCFG.STA.ALDIS;
#DLNK := #AOVARCFG.STA.DLNK;
#ENBL := #AOVARCFG.STA.ENBL;
#INBUF := #AOVARCFG.STA.INBUF;
#FRC := #AOVARCFG.STA.FRC;
#SML := #AOVARCFG.STA.SML;
#CMDLOAD := #AOVARCFG.STA.CMDLOAD;
#INBUF := (#AOVARCFG.ID = "BUF".VARBUF.ID) AND (#AOVARCFG.CLSID = "BUF".VARBUF.CLSID); (*змінна в буфері якщо співпадає ідентифікатор змінної та ідентифікатор класу*)
#CMDLOAD := #AOVARHMI.STA.%X15; (*команда запису в буфер з НМІ змінної*)
#CMD := 0; (*онулення внутрішньої команда*)
#DLNK := (#CHCFG.ID > 0); (*змінна привязана до каналу якщо канал має реальний ідентифікатор (не 0 - не молоко)*)
#VARENBL := NOT #AOVARCFG.PRM.DSBL AND #DLNK;(*змінна задіяна якщо привязана до каналу і не активний параметр змінна не задіяна*)
#T_STEPMS := #AOVARCFG.T_STEP1; (*запамятовування часу циклу в мс*)
#VAL := #AOVARCFG.VAL; (*зчитування значення з технологічної змінної у внутрішню дляя подальшої обробки*)
#VRAW := #AOVARCFG.VRAW; (*зчитування сирого значення з каналу*)
(*реалізація алгоритму ping-pong*)
IF #DLNK THEN
#CHCFG.STA.PNG := true;
#CHCFG.VARID := #AOVARCFG.ID;
END_IF;
(*якщо змінна не задіяна не рахуємо час, скидаємо стан *)
IF NOT #VARENBL THEN
#AOVARCFG.T_STEP1 := 0;
#AOVARCFG.STEP1 := 400;
END_IF;
(*визначення часу між викликами функції по різниці між мілісікундним лічильником та часом який пройшов з попереднього виклику *)
#dT := "SYS".PLCCFG.TQMS - #AOVARCFG.T_PREV;
(* широкомовне дефорсування*)
IF "SYS".PLCCFG.CMD = 16#4302 THEN
#FRC := false; (*дефорсувати об'єкт типу*)
END_IF;
(*вибір джерела конфігураційної/керівної команди згідно пріоритету якщо команди надійшли одночасно*)
IF #CMDLOAD THEN (*команда запису в буфер - команда з НМІ*)
#CMD := 16#0100;
ELSIF #INBUF AND "BUF".VARBUF.CMD <> 0 THEN (*команда з буферу*)
#CMD := "BUF".VARBUF.CMD;
END_IF;
(*commands*)
CASE #CMD OF
16#0001: (*записати максимум діапазону*)
IF #FRC AND #INBUF THEN
#AOVARCFG.VALFRC := #AOVARCFG.HIENG;
#VAL := #AOVARCFG.HIENG;
#AOVARCFG.STEP1 := 100;
#AOVARCFG.T_STEP1 := 0;
END_IF;
16#0002: (*записати мінімум діапазону*)
IF #FRC AND #INBUF THEN
#AOVARCFG.VALFRC := #AOVARCFG.LOENG;
#VAL := #AOVARCFG.LOENG;
#AOVARCFG.STEP1 := 100;
#AOVARCFG.T_STEP1 := 0;
END_IF;
16#0003: (*записати середину діапазону*)
IF #FRC AND #INBUF THEN
#AOVARCFG.VALFRC := (#AOVARCFG.HIENG - #AOVARCFG.LOENG) / 2.0;
#VAL := (#AOVARCFG.HIENG - #AOVARCFG.LOENG) / 2.0;
#AOVARCFG.STEP1 := 100;
#AOVARCFG.T_STEP1 := 0;
END_IF;
16#0100: (*прочитати конфігурацію*)
(* MSG 200-Ok 400-Error
// 200 - Дані записані
// 201 - Дані прочитані
// 403 - канал вже зайнятий
// 404 - номер каналу не відповідає діапазону
// 405 - активна статична адресація каналів *)
"BUF".VARBUF.MSG := 201;
(*зчитати ідентифікатор змінної та ідентифікатор класу*)
"BUF".VARBUF.ID := #AOVARCFG.ID;
"BUF".VARBUF.CLSID := #AOVARCFG.CLSID;
(*зчитати бітові параметри*)
"BUF".VARBUF.PRM.%X6 := #AOVARCFG.PRM.QALENBL;
"BUF".VARBUF.PRM.%X7 := #AOVARCFG.PRM.DSBL;
"BUF".VARBUF.PRM.%X8 := #AOVARCFG.PRM.PWLENBL;
"BUF".VARBUF.PRM.%X14 := #AOVARCFG.PRM.STATICMAP;
"BUF".VARBUF.PRM.%X15 := #AOVARCFG.PRM.NORAW;
(*зчитати параметри*)
"BUF".VARBUF.CHID := #AOVARCFG.CHID;
"BUF".VARBUF.LORAW := #AOVARCFG.LORAW;
"BUF".VARBUF.HIRAW := #AOVARCFG.HIRAW;
"BUF".VARBUF.LOENG := #AOVARCFG.LOENG;
"BUF".VARBUF.HIENG := #AOVARCFG.HIENG;
"BUF".VARBUF.T_FLTSP := #AOVARCFG.T_FLT;
(*зчитати значення змінної для безударного форсування*)
"BUF".VARBUF.VALR := #AOVARCFG.VALFRC;
16#0101: (*записати конфігурацію*)
(* MSG 200-Ok 400-Error
// 200 - Дані записані
// 201 - Дані прочитані
// 403 - канал вже зайнятий
// 404 - номер каналу не відповідає діапазону
// 405 - активна статична адресація каналів*)
"BUF".VARBUF.MSG:=200;
(*записати бітові параметри*)
#AOVARCFG.PRM.QALENBL := "BUF".VARBUF.PRM.%X6;
#AOVARCFG.PRM.DSBL := "BUF".VARBUF.PRM.%X7;
#AOVARCFG.PRM.PWLENBL := "BUF".VARBUF.PRM.%X8;
#AOVARCFG.PRM.STATICMAP := "BUF".VARBUF.PRM.%X14;
#AOVARCFG.PRM.NORAW := "BUF".VARBUF.PRM.%X15;
(*записати параметри*)
#AOVARCFG.LORAW := "BUF".VARBUF.LORAW;
#AOVARCFG.HIRAW := "BUF".VARBUF.HIRAW;
#AOVARCFG.LOENG := "BUF".VARBUF.LOENG;
#AOVARCFG.HIENG := "BUF".VARBUF.HIENG;
#AOVARCFG.T_FLT := "BUF".VARBUF.T_FLTSP;
IF NOT #AOVARCFG.PRM.STATICMAP THEN (* зміна логічного номеру каналу тільки при неактивна статичн адресація*)
IF "BUF".VARBUF.CHID>=0 AND "BUF".VARBUF.CHID <= INT_TO_UINT("SYS".PLCCFG.AOCNT) THEN (* якщо логічний номер канал менший за кількість каналів*)
IF "SYS".CHAO["BUF".VARBUF.CHID].VARID = 0 THEN (* якщо логічний номер канал нульовий - вільний *)
#AOVARCFG.CHID := "BUF".VARBUF.CHID; (* змінити логічний номер каналу *)
ELSIF "BUF".VARBUF.CHID <> #AOVARCFG.CHID THEN (* інакше вивести помилку про зайнятість каналу *)
"BUF".VARBUF.MSG := 403;(* канал вже зайнятий*)
END_IF;
ELSE
"BUF".VARBUF.MSG := 404; (*номер каналу не відповідає діапазону*)
END_IF;
ELSIF "BUF".VARBUF.CHID <> #AOVARCFG.CHID THEN (* інакше вивести помилку активна статична адресація каналів *)
"BUF".VARBUF.MSG := 405;(* активна статична адресація каналів*)
END_IF;
IF #INBUF THEN (*оновити логічний номер каналу після запису якщо змінна ще в буфері*)
"BUF".VARBUF.CHID := #AOVARCFG.CHID;
END_IF;
16#0102: (*записати значення за замовченням*)
#AOVARCFG.CHID := #AOVARCFG.CHIDDF;
16#0300: (*перемкнути форсування*)
#FRC := NOT #FRC;
16#0301: (*ввімкнути форсування*)
#FRC := true;
16#0302: (*вимкнути форсування*)
#FRC := false;
16#0311: (* імітувати*)
#SML := true;
16#0312: (* зняти режим імітації*)
#SML := false;
END_CASE;
(*перевірка на коректність діапазонів*)
IF ABS (#AOVARCFG.HIRAW - #AOVARCFG.LORAW) < 1 THEN
#AOVARCFG.LORAW := 0;
#AOVARCFG.HIRAW := 27648;
END_IF;
IF ABS(#AOVARCFG.HIENG - #AOVARCFG.LOENG) < 0.00001 THEN
#AOVARCFG.LOENG := 0.0;
#AOVARCFG.HIENG := 100.0;
END_IF;
(*визначення 1% від шкали*)
#VAL1PROC := INT_TO_REAL(#AOVARCFG.HIRAW - #AOVARCFG.LORAW) / 100.0;
IF #VAL1PROC = 0.0 THEN
#VAL1PROC := 1.0;
END_IF;
(*val*)
IF #FRC THEN (*режим форсування*)
IF #INBUF THEN
#AOVARCFG.VALFRC := "BUF".VARBUF.VALR;
END_IF;
#VAL := #AOVARCFG.VALFRC;
ELSE
#AOVARCFG.VALFRC := #VAL;
END_IF;
IF #VARENBL THEN
(*якщо попереднього значення виходить за діапазон вводимо обмеження діапазону*)
IF #AOVARCFG.VALPRV<#AOVARCFG.LOENG THEN #AOVARCFG.VALPRV:=#AOVARCFG.LOENG; END_IF;
IF #AOVARCFG.VALPRV>#AOVARCFG.HIENG THEN #AOVARCFG.VALPRV:=#AOVARCFG.HIENG; END_IF;
(*фільтрація*)
IF #AOVARCFG.T_FLT <= 0 THEN (*час фільтрації не може бути нульовим*)
#AOVARCFG.T_FLT := 1;
END_IF;
#VALFLT:="A_FLTR" (IN := #VAL, dT := #dT, T_FLT := UINT_TO_UDINT(#AOVARCFG.T_FLT), PRM := #tmpuint, STA := #tmpuint, VALPRV := #AOVARCFG.VALPRV);
(*масштабування*)
#PRM_SCL:=0;
#STA_SCL:=0;
#PRM_SCL.%X0 := false;(*//квадратнокоренева залежність, X0 *)
#PRM_SCL.%X1 := FALSE;(*//обмежувати вихідну величину, X1 *)
IF NOT #AOVARCFG.PRM.NORAW THEN (*якщо маштабування не відімкнено*)
#VRAW := REAL_TO_INT("SCALING" (IN := #VALFLT, in_min := #AOVARCFG.LOENG, in_max := #AOVARCFG.HIENG, out_min := INT_TO_REAL(#AOVARCFG.LORAW), out_max := INT_TO_REAL(#AOVARCFG.HIRAW), STA := #STA_SCL, PRM := #PRM_SCL)); (*в сире значення записується маштабована величина*)
ELSE
#VRAW := REAL_TO_INT(#VALFLT); (*інакше значення не маштабується*)
END_IF;
IF NOT #SML THEN (* режим симуляції - вихідне значення не змінюється *)
#CHCFG.VAL := #VRAW;
END_IF;
END_IF;
(*обробка тривог - недостовірність каналу*)
#tempBAD := #CHCFG.STA.BAD AND #AOVARCFG.PRM.QALENBL AND #VARENBL AND NOT #SML;
#TDEAQALSP := 10; (* час затримки на виникнення тривог бед в 0.1 с*)
CASE #AOVARCFG.STEP1 OF
0:(*init*)
#AOVARCFG.STEP1 := 100;
#AOVARCFG.T_STEP1 := 0;
100:(*norma*)
#BAD := false;
IF #tempBAD THEN
#AOVARCFG.STEP1 := 150;
#AOVARCFG.T_STEP1 := 0;
END_IF;
150:(*norma to BAD*)
IF #AOVARCFG.T_STEP1 > INT_TO_UDINT(#TDEAQALSP) THEN
#AOVARCFG.STEP1 := 200;
#AOVARCFG.T_STEP1 := 0;
ELSIF NOT #tempBAD THEN
#AOVARCFG.STEP1 := 100;
#AOVARCFG.T_STEP1 := 0;
END_IF;
200:(*BAD*)
#BAD := true;
IF NOT #tempBAD AND #AOVARCFG.T_STEP1 > INT_TO_UDINT(#TDEAQALSP) THEN
#AOVARCFG.STEP1 := 100;
#AOVARCFG.T_STEP1 := 0;
END_IF;
ELSE
#AOVARCFG.STEP1 := 0;
END_CASE;
(*передача тривог для змінної PLCCFG для формування загального статусного біта і визначення нової тривоги*)
IF #BAD THEN
"SYS".PLCCFG.ALM1.BAD := true;
"SYS".PLCCFG.CNTBAD := "SYS".PLCCFG.CNTBAD + 1;
IF NOT #AOVARCFG.STA.BAD THEN
"SYS".PLCCFG.ALM1.NWBAD := true;
END_IF;
END_IF;
(*передача статусних бітів для змінної PLCCFG для формування загального статусного біта*)
IF #FRC THEN
"SYS".PLCCFG.STA.FRC1 := true;
"SYS".PLCCFG.CNTFRC := "SYS".PLCCFG.CNTFRC + 1;
END_IF;
IF #SML THEN
"SYS".PLCCFG.STA.SML := true;
END_IF;
#CMDLOAD := FALSE;
(*передача статусних бітів з внутрішніх змінних в технологічну змінну*)
#AOVARCFG.STA.BAD := #BAD;
#AOVARCFG.STA.ALDIS := #ALDIS;
#AOVARCFG.STA.DLNK := #DLNK;
#AOVARCFG.STA.ENBL := #VARENBL;
#AOVARCFG.STA.INBUF := #INBUF;
#AOVARCFG.STA.FRC := #FRC;
#AOVARCFG.STA.SML := #SML;
#AOVARCFG.STA.CMDLOAD := FALSE;
(*значення у % та обмеження*)
IF #VAL1PROC = 0.0 THEN
#VAL1PROC := 1.0;
END_IF;
#VALPROC := INT_TO_REAL(#CHCFG.VAL - #AOVARCFG.LORAW) / #VAL1PROC;
IF #VALPROC < 0.0 THEN
#VALPROC := 0.0;
END_IF;
IF #VALPROC > 100.0 THEN
#VALPROC := 100.0;
END_IF;
(*передача значення з внутрішніх змінних в технологічну змінну*)
#AOVARCFG.VAL := #VAL;
#AOVARCFG.VRAW := #VRAW;
#AOVARCFG.VALPROC := REAL_TO_INT(#VALPROC*256.0) AND 16#FF00;(*по аналогії з AIVAR*)
(*передача значення в HMI частину*)
#AOVARHMI.STA.%X0 := #AOVARCFG.STA.STA_b0;
#AOVARHMI.STA.%X1 := #AOVARCFG.STA.STA_b1;
#AOVARHMI.STA.%X2 := #AOVARCFG.STA.BAD;
#AOVARHMI.STA.%X3 := #AOVARCFG.STA.ALDIS;
#AOVARHMI.STA.%X4 := #AOVARCFG.STA.DLNK;
#AOVARHMI.STA.%X5 := #AOVARCFG.STA.ENBL;
#AOVARHMI.STA.%X6 := #AOVARCFG.STA.STA_b6;
#AOVARHMI.STA.%X7 := #AOVARCFG.STA.STA_b7;
#AOVARHMI.STA.%X8 := #AOVARCFG.STA.STA_b8;
#AOVARHMI.STA.%X9 := #AOVARCFG.STA.STA_b9;
#AOVARHMI.STA.%X10 := #AOVARCFG.STA.STA_b10;
#AOVARHMI.STA.%X11 := #AOVARCFG.STA.STA_b11;
#AOVARHMI.STA.%X12 := #AOVARCFG.STA.INBUF;
#AOVARHMI.STA.%X13 := #AOVARCFG.STA.FRC;
#AOVARHMI.STA.%X14 := #AOVARCFG.STA.SML;
#AOVARHMI.STA.%X15 := #AOVARCFG.STA.CMDLOAD;
#AOVARHMI.VAL := #VAL;
#AOVARHMI.VALPROC := #AOVARCFG.VALPROC;
#AOVARCFG.T_PREV := "SYS".PLCCFG.TQMS;(*запамятовування часу останнього виклику екземпляра функції*)
(*підрахунок часу стану та обмеження його по верхній межі діапазону*)
#AOVARCFG.T_STEP1 := #AOVARCFG.T_STEP1 + #dT;
IF #AOVARCFG.T_STEP1 > 16#7FFF_FFFF THEN
#AOVARCFG.T_STEP1 := 16#7FFF_FFFF;
END_IF;
(*автоматичне оновлення якщо змінна записана в буфер*)
IF #INBUF THEN
"BUF".VARBUF.CMD := 0;
"BUF".VARBUF.STA.%X0 := #AOVARCFG.STA.STA_b0;
"BUF".VARBUF.STA.%X1 := #AOVARCFG.STA.STA_b1;
"BUF".VARBUF.STA.%X2 := #AOVARCFG.STA.BAD;
"BUF".VARBUF.STA.%X3 := #AOVARCFG.STA.ALDIS;
"BUF".VARBUF.STA.%X4 := #AOVARCFG.STA.DLNK;
"BUF".VARBUF.STA.%X5 := #AOVARCFG.STA.ENBL;
"BUF".VARBUF.STA.%X6 := #AOVARCFG.STA.STA_b6;
"BUF".VARBUF.STA.%X7 := #AOVARCFG.STA.STA_b7;
"BUF".VARBUF.STA.%X8 := #AOVARCFG.STA.STA_b8;
"BUF".VARBUF.STA.%X9 := #AOVARCFG.STA.STA_b9;
"BUF".VARBUF.STA.%X10 := #AOVARCFG.STA.STA_b10;
"BUF".VARBUF.STA.%X11 := #AOVARCFG.STA.STA_b11;
"BUF".VARBUF.STA.%X12 := #AOVARCFG.STA.INBUF;
"BUF".VARBUF.STA.%X13 := #AOVARCFG.STA.FRC;
"BUF".VARBUF.STA.%X14 := #AOVARCFG.STA.SML;
"BUF".VARBUF.STA.%X15 := #AOVARCFG.STA.CMDLOAD;
"BUF".VARBUF.VRAWR := INT_TO_REAL(#VRAW);
"BUF".VARBUF.VALR := #VAL;
"BUF".VARBUF.VALPROC := #AOVARCFG.VALPROC;
"BUF".VARBUF.STEP1 := #AOVARCFG.STEP1;
"BUF".VARBUF.T_STEP1 := #AOVARCFG.T_STEP1;
(*зчитування статусних бітів фізичного каналу технологічної змінної*)
"BUF".VARBUF.CH_CLSID := #CHCFG.CLSID;
"BUF".VARBUF.CH_STA.%X0 := #CHCFG.STA.VRAW;
"BUF".VARBUF.CH_STA.%X1 := #CHCFG.STA.VALB;
"BUF".VARBUF.CH_STA.%X2 := #CHCFG.STA.BAD;
"BUF".VARBUF.CH_STA.%X3 := #CHCFG.STA.b3;
"BUF".VARBUF.CH_STA.%X4 := #CHCFG.STA.PNG;
"BUF".VARBUF.CH_STA.%X5 := #CHCFG.STA.ULNK;
"BUF".VARBUF.CH_STA.%X6 := #CHCFG.STA.MERR;
"BUF".VARBUF.CH_STA.%X7 := #CHCFG.STA.BRK;
"BUF".VARBUF.CH_STA.%X8 := #CHCFG.STA.SHRT;
"BUF".VARBUF.CH_STA.%X9 := #CHCFG.STA.NBD;
"BUF".VARBUF.CH_STA.%X10 := #CHCFG.STA.b10;
"BUF".VARBUF.CH_STA.%X11 := #CHCFG.STA.INIOTBUF;
"BUF".VARBUF.CH_STA.%X12 := #CHCFG.STA.INBUF;
"BUF".VARBUF.CH_STA.%X13 := #CHCFG.STA.FRC;
"BUF".VARBUF.CH_STA.%X14 := #CHCFG.STA.SML;
"BUF".VARBUF.CH_STA.%X15 := #CHCFG.STA.CMDLOAD;
(*функція обрахунку фізичного значення сигналу в мА,В і т.д*)
"BUF".VARBUF.CH_VALSIG := "INT_TO_SIGU" (CLSID := #CHCFG.CLSID, VALINT := #VRAW);
END_IF;
(*реалізація читання конфігураційних даних в буфер out*)
IF (UINT_TO_WORD(#AOVARCFG.CLSID) AND 16#FFF0)=(UINT_TO_WORD("BUF".VARBUFIN.CLSID) AND 16#FFF0) AND #AOVARCFG.ID="BUF".VARBUFIN.ID AND "BUF".VARBUFIN.CMD = 16#100 THEN
(* MSG 200-Ok 400-Error
// 200 - Дані записані
// 201 - Дані прочитані
// 403 - канал вже зайнятий
// 404 - номер каналу не відповідає діапазону *)
"BUF".VARBUFOUT.MSG := 201;
"BUF".VARBUFOUT.PRM.%X6 := #AOVARCFG.PRM.QALENBL;
"BUF".VARBUFOUT.PRM.%X7 := #AOVARCFG.PRM.DSBL;
"BUF".VARBUFOUT.PRM.%X8 := #AOVARCFG.PRM.PWLENBL;
"BUF".VARBUFOUT.PRM.%X14 := #AOVARCFG.PRM.STATICMAP;
"BUF".VARBUFOUT.PRM.%X15 := #AOVARCFG.PRM.NORAW;
"BUF".VARBUFOUT.ID := #AOVARCFG.ID;
"BUF".VARBUFOUT.CLSID := #AOVARCFG.CLSID;
"BUF".VARBUFOUT.CHID := #AOVARCFG.CHID;
"BUF".VARBUFOUT.VALR := #AOVARCFG.VALFRC;
"BUF".VARBUFOUT.LORAW := #AOVARCFG.LORAW;
"BUF".VARBUFOUT.HIRAW := #AOVARCFG.HIRAW;
"BUF".VARBUFOUT.LOENG := #AOVARCFG.LOENG;
"BUF".VARBUFOUT.HIENG := #AOVARCFG.HIENG;
"BUF".VARBUFOUT.T_FLTSP := #AOVARCFG.T_FLT;
"BUF".VARBUFIN.CMD :=0;
END_IF;
(*реалізація запису конфігураційних даних з буфер in в технологічну змінну*)
IF (UINT_TO_WORD(#AOVARCFG.CLSID) AND 16#FFF0)=(UINT_TO_WORD("BUF".VARBUFIN.CLSID) AND 16#FFF0) AND #AOVARCFG.ID="BUF".VARBUFIN.ID AND "BUF".VARBUFIN.CMD = 16#101 THEN
(* MSG 200-Ok 400-Error
// 200 - Дані записані
// 201 - Дані прочитані
// 403 - канал вже зайнятий
// 404 - номер каналу не відповідає діапазону *)
"BUF".VARBUFOUT:="BUF".VARBUFIN;
#AOVARCFG.PRM.QALENBL := "BUF".VARBUFIN.PRM.%X6;
#AOVARCFG.PRM.DSBL := "BUF".VARBUFIN.PRM.%X7;
#AOVARCFG.PRM.PWLENBL := "BUF".VARBUFIN.PRM.%X8;
#AOVARCFG.PRM.STATICMAP := "BUF".VARBUFIN.PRM.%X14;
#AOVARCFG.PRM.NORAW := "BUF".VARBUFIN.PRM.%X15;
#AOVARCFG.LORAW := "BUF".VARBUFIN.LORAW;
#AOVARCFG.HIRAW := "BUF".VARBUFIN.HIRAW;
#AOVARCFG.LOENG := "BUF".VARBUFIN.LOENG;
#AOVARCFG.HIENG := "BUF".VARBUFIN.HIENG;
#AOVARCFG.T_FLT := "BUF".VARBUFIN.T_FLTSP;
(*перевіряти незайнятість каналу треба в функції контролю буферу *)
"BUF".VARBUFOUT.MSG:=200;
IF NOT #AOVARCFG.PRM.STATICMAP THEN
IF "BUF".VARBUFIN.CHID>=0 AND "BUF".VARBUFIN.CHID <= INT_TO_UINT("SYS".PLCCFG.AOCNT) THEN
IF "SYS".CHAO["BUF".VARBUFIN.CHID].VARID = 0 THEN
#AOVARCFG.CHID := "BUF".VARBUFIN.CHID;
ELSIF "BUF".VARBUFIN.CHID <> #AOVARCFG.CHID THEN
"BUF".VARBUFOUT.MSG := 403;(* канал вже зайнятий*)
END_IF;
ELSE
"BUF".VARBUFOUT.MSG := 404; (*номер каналу не відповідає діапазону*)
END_IF;
ELSIF "BUF".VARBUFIN.CHID <> #AOVARCFG.CHID THEN (* інакше вивести помилку активна статична адресація каналів *)
"BUF".VARBUFOUT.MSG := 405;(* активна статична адресація каналів*)
END_IF;
"BUF".VARBUFIN.CMD :=0;
END_IF;
Тестування
Загальні вимоги щодо тестування наведені в документі класи LVL1. Тут приводяться тільки особливі тести, що відрізняються від загальних.
Перелік тестів
| Номер | Назва | Коли перевіряти | Примітки |
|---|---|---|---|
| 1 | Присвоєння ID та CLSID при старті | після реалізації функції | |
| 2 | Команди запису до буферу | після реалізації функції | |
| 3 | Зміна параметрів та запис з буфера | після реалізації функції | |
| 4 | Зміни логічного номеру каналу | після реалізації функції | |
| 5 | Запис значення CHID за замовченням при старті, при одинарній команді | після реалізації функції | |
| 6 | Робота вбудованих лічильників часу | після реалізації функції | |
| 7 | Вплив перекидування лічильника часу ПЛК на час кроку | після реалізації функції | |
| 8 | Алгоритм Ping-Pong | після реалізації функції | |
| 9 | Робота в нефорсованому режимі | після реалізації функції | |
| 10 | Робота в форсованому режимі | після реалізації функції | |
| 11 | Відправка широкомовних команд на дефорсування | після реалізації функції | |
| 12 | Робота в режимі імітації | після реалізації функції | |
| 13 | Функція маштабування | ||
| 14 | Функція фільтрації | після реалізації функції | |
| 15 | Виведення змінної з експлуатації | після реалізації функції | |
1 Присвоєння ID та CLSID при старті
- перед запуском перевірки ПЛК повинен бути в СТОП
- після запуску усім технологічним змінним, використаним в програмі повинні бути присвоєні ID та CLSID
2 Команди прив’язування до буферу
| Номер | Дія для перевірки | Очікуваний результат | Примітки |
|---|---|---|---|
| 1 | Змінити STA.X15:=1 для однієї зі змінних AOVAR_HMI | у VARBUF повинно завантажитися весь зміст AOVAR_CFG для AOVAR_HMI повинен STA.X15 = 0 для AOVAR_HMI, AOVAR_CFG та VARBUF повинне STA.12(INBUF)=1 |
|
| 2 | Змінити значення AOVAR_CFG.VAL | відповідне значення зміниться у AOVAR_HMI.VAL та VARBUF.VAL | |
| 3 | Змінити STA.X15:=1 для іншої змінної AOVAR_HMI | у VARBUF повинно завантажитися весь зміст AOVAR_CFG іншої змінної | |
| 4 | Змінити одне з конфігураційних полів в VARBUF, наприклад VARBUF.CHID, та виконайте команду запису в буфер (використовується для оновлення значень) VARBUF.CMD:=16#100 | змінена змінна VARBUF.CHID повинна змінитись на попереднє значення |
3 Зміна параметрів та запис з буфера
| Номер | Дія для перевірки | Очікуваний результат | Примітки |
|---|---|---|---|
| 1 | Змінити STA.X15:=1 для однієї зі змінних AOVAR_HMI | у VARBUF повинно завантажитися весь зміст AOVAR_CFG для AOVAR_HMI повинен STA.X15 = 0 для AOVAR_HMI, AOVAR_CFG та VARBUF повинне STA.12(INBUF)=1 |
|
| 2 | Змінити одне з конфігураційних полів в VARBUF, наприклад VARBUF.T_FLT, та виконайте команду запису з буфера VARBUF.CMD:=16#101 | в змінній AOVAR_CFG.T_FLT повинно відобразитись нове значення | |
| 3 | Повторіть п.2 для іншого параметра | ||
4 Зміни логічного номеру каналу
| Номер | Дія для перевірки | Очікуваний результат | Примітки |
|---|---|---|---|
| 1 | Змінити STA.X15:=1 для однієї зі змінних AOVAR_HMI | у VARBUF повинно завантажитися весь зміст AOVAR_CFG для AOVAR_HMI повинен STA.X15 = 0 для AOVAR_HMI, AOVAR_CFG та VARBUF повинне STA.12(INBUF)=1 |
|
| 2 | Змінити значення VARBUF.CHID на довільне значення в межах існуючих фізичних каналів та на значення вільного каналу, та виконайте команду запису з буфера VARBUF.CMD:=16#101 |
в змінній AOVAR_CFG.CHID повинно відобразитись нове значення, а VARBUF.MSG повинна відобразити повідомлення про успішний запис параметра VARBUF.MSG = 200 | |
| 3 | Змінити значення VARBUF.CHID на довільне значення в межах існуючих фізичних каналів та на значення зайнятого каналу, та виконайте команду запису з буфера VARBUF.CMD:=16#101 |
в змінній AOVAR_CFG.CHID значення не повинно змінитись, VARBUF.CHID повинно повернутись до коректного значення, а VARBUF.MSG повинна відобразити повідомлення про помилку зайнятого каналу VARBUF.MSG = 403 | |
| 4 | Змінити значення VARBUF.CHID на довільне значення яке виходить за межі існуючих фізичних каналів, та виконайте команду запису з буфера VARBUF.CMD:=16#101 |
в змінній AOVAR_CFG.CHID значення не повинно змінитись, VARBUF.CHID повинно повернутись до коректного значення, а VARBUF.MSG повинна відобразити повідомлення про помилку неіснуючого каналу VARBUF.MSG = 404 | |
| 5 | Активувати параметр статична адресація параметрів AOVAR_CFG.PRM.STATICMAP:=1, який унеможливлює зміну логічного номеру каналу. Змінити значення VARBUF.CHID на довільне значення в межах існуючих фізичних каналів та на значення вільного каналу, та виконайте команду запису з буфера VARBUF.CMD:=16#101 |
в змінній AOVAR_CFG.CHID значення не повинно змінитись, VARBUF.CHID повинно повернутись до попереднього значення, а VARBUF.MSG повинна відобразити повідомлення про статичну адресацію каналу VARBUF.MSG = 405 | |
5 Запис значення CHID за замовченням при старті, при одинарній команді
- при старті
- перед запуском перевірки ПЛК повинен бути в СТОП
- після запуску для всіх технологічним змінним повинно записатись значення в CHID та CHIDDF
- при одинарній команді
| Номер | Дія для перевірки | Очікуваний результат | Примітки |
|---|---|---|---|
| 1 | Змінити STA.X15:=1 для однієї зі змінних AOVAR_HMI | у VARBUF повинно завантажитися весь зміст AOVAR_CFG для AOVAR_HMI повинен STA.X15 = 0 для AOVAR_HMI, AOVAR_CFG та VARBUF повинне STA.12(INBUF)=1 |
|
| 2 | Змінити значення VARBUF.CHID на довільне значення в межах існуючих фізичних каналів та на значення вільного каналу, та виконайте команду запису з буфера VARBUF.CMD:=16#101 |
в змінній AOVAR_CFG.CHID повинно відобразитись нове значення, а VARBUF.MSG повинна відобразити повідомлення про успішний запис параметра VARBUF.MSG = 200 | |
| 3. | виконайте команду записати значення за замовченням VARBUF.CMD:=16#102 | в змінній AOVAR_CFG.CHID повинно відобразитись значення яке було збережено в AOVAR_CFG.CHIDDF | |
6 Робота вбудованих лічильників часу
Плинний час кроку для змінної AOVAR_CFG відображається в AOVAR_CFG.T_STEP1. Значення відображається в мс. Точність AOVAR_CFG.T_STEP1 перевіряється астрономічним годинником.
7 Вплив перекидування лічильника часу ПЛК на час кроку
| Номер | Дія для перевірки | Очікуваний результат | Примітки |
|---|---|---|---|
| 1 | переглянути як змінюється змінна PLCCFG.TQMS та AOVAR1.T_STEP1 , точність оцінити за допомогою астрономічним годинником | PLCCFG.TQMS та AOVAR1.T_STEP1 рахують час в мс | |
| 2 | в PLCCFG.TQMS записати значення 16#FFFF_FFFF - 5000 (5000 мс до кінця діапазону) та в AOVAR1.T_STEP1 записати значення 16#7FFF_FFFF - 10000 (10000 мс до кінця діапазону) | певний час (5000 мc) час буде рахуватись в звичайному вигляді, але коли PLCCFG.TQMS досягне верху діапазону(16#FFFF_FFFF), то PLCCFG.TQMS почне рахувати з початку, а AOVAR1.T_STEP1 рахуватиме в нормальному режимі поки не прийме максимальне значення свого діапазону (16#7FFFFFFF) і відлік для нього зупиниться | |
8 Алгоритм Ping-Pong
| Номер | Дія для перевірки | Очікуваний результат | Примітки |
|---|---|---|---|
| 1 | Перевірити значення фізичного каналу CHAO.VARID до якого прив’язана тестова зміна AOVAR1 | в CHAO.VARID повинно відображатись AOVAR1.ID, CHAO.STA_ULNK=1 та AOVAR1.STA.DLNK=1 | |
| 2 | Записати значення AOVAR1.CHID:=0 | значення AOVAR1.STA.DLNK=0 - змінна не прив’язана до технологічного каналу, CHAO.VARID = 0 та CHAO.STA_ULNK=0 до канала не прив’язано технологічну змінну |
|
| 3 | Записати попереднє значення в AOVAR1.CHID | в CHAO.VARID повинно відображатись AOVAR1.ID, CHAO.STA_ULNK=1 та AOVAR1.STA.DLNK=1 | |
| 4 | повторити попередні пункти для іншої технологічної змінної |
9 Робота в нефорсованому режимі
| Номер | Дія для перевірки | Очікуваний результат | Примітки |
|---|---|---|---|
| 1 | Змінити STA.X15:=1 для однієї зі змінних AOVAR_HMI | у VARBUF повинно завантажитися весь зміст AOVAR_CFG для AOVAR_HMI повинен STA.X15 = 0 для AOVAR_HMI, AOVAR_CFG та VARBUF повинне STA.12(INBUF)=1 |
|
| 2 | Змінити значення AOVAR_CFG.VAL | відповідне значення відобразиться в AOVAR_HMI.VAL, VARBUF.VAL та AOVAR_HMI.VALPRCSTA2, а також відмасштабується та відобразиться в AОVAR_CFG.VRAW | |
| 3 | Налаштувати параметри масштабування межі АЦП AOVARCFG.LORAW, AOVARCFG.HIRAW та межі вимірювання AOVARCFG.LOENG, AOVARCFG.HIENG | ||
| 4 | Змінити значення AOVAR_CFG.VAL | Від масштабоване значення повинно відобразитись в змінних AОVAR_CFG.VRAW. Перевірити правильність масштабування. | |
| 6 | Виставити параметр джерело даних змінюється ззовні, відсутність масштабування (для мережних і внутрішніх змінних) AOVAR_CFG.PRM.NORAW на 1 та змінити значення AOVAR_CFG.VAL на довільне | значення AOVAR_CFG.VAL повинно з’явитись в AОVAR_CFG.VRAW | |
10 Робота в форсованому режимі
| Номер | Дія для перевірки | Очікуваний результат | Примітки |
|---|---|---|---|
| 1 | Змінити STA.X15:=1 для однієї зі змінних AOVAR_HMI | у VARBUF повинно завантажитися весь зміст AOVAR_CFG для AOVAR_HMI повинен STA.X15 = 0 для AOVAR_HMI, AOVAR_CFG та VARBUF повинне STA.12(INBUF)=1 |
|
| 2 | Відправити команду форсування VARBUF.CMD=16#0301 | біт STA.FRC повинен дорівнювати 1 | |
| 3 | Змінити значення AOVAR1.VAL | відповідне значення не зміниться у AOVAR_HMI.VAL та VARBUF.VALR | |
| 4 | Відправити команду 16#0001 (записати максимум діапазону) | значення AOVAR1.VAL повинно змінитися на максимум діапазону | |
| 5 | Відправити команду 16#0002 (записати мінімум діапазону) | значення AOVAR1.VAL повинно змінитися на мінімум діапазону | |
| 6 | Відправити команду 16#0003 (записати середину діапазону) | значення AOVAR1.VAL повинно змінитися на середину діапазону | |
| 7 | Змінити значення VARBUF.VALR |
значення AOVAR1.VAL повинно змінитися на вказане | |
| 8 | Відправити команду дефорсування VARBUF.CMD=16#0302 | біт STA.FRC повинен дорівнювати 0, AOVAR1.VAL не повинно змінити своє значення | |
| 9 | Відправити команду перемикання форсування 16#0300, повторити кілька разів, залишити в режимі форсування | біт STA.FRC повинен перемкнутися на протилежне | |
| 10 | Перевести в режим форсування кілька змінних | біт STA.FRC відповідних змінних повинен дорівнювати 1 | |
| 11 | Перевірити значення змінних PLC.STA_PERM і PLC.CNTFRC_PERM | повинні PLC.STA_PERM.X11=1, PLC.CNTFRC_PERM дорівнювати кількості зафорсованих змінних | |
| 12 | Зняти з режиму форсування усі змінні | повинні PLC.STA_PERM.X11=0, PLC.CNTFRC_PERM=0 | |
11 Відправка широкомовних команд на дефорсування
| Номер кроку | Дія для перевірки | Очікуваний результат | Примітки |
|---|---|---|---|
| 1 | Перевести в режим форсування кілька змінних | біт STA.FRC відповідних змінних повинен дорівнювати 1 | |
| 2 | Перевірити значення змінних PLC.STA_PERM і PLC.CNTFRC_PERM | повинні PLC.STA_PERM.X11=1, PLC.CNTFRC_PERM дорівнювати кількості зафорсованих змінних | |
| 3 | відправити широкомовну команду на дефорсування усіх змінних PLC.CMD=16#4302 | біт STA.FRC усіх змінних повинен дорівнювати 0, PLC.CNTFRC_PERM=0 |
12 Робота в режимі імітації
| Номер | Дія для перевірки | Очікуваний результат | Примітки |
|---|---|---|---|
| 1 | Змінити STA.X15:=1 для однієї зі змінних AOVAR_HMI | у VARBUF повинно завантажитися весь зміст AOVAR_CFG для AOVAR_HMI повинен STA.X15 = 0 для AOVAR_HMI, AOVAR_CFG та VARBUF повинне STA.12(INBUF)=1 |
|
| 2 | Відправити команду ввімкнення імітації VARBUF.CMD=16#0311 | біт STA.SML повинен дорівнювати 1 | |
| 3 | Змінити значення AOVAR_CFG.VAL | відповідне значення зміниться у AOVAR_HMI та VARBUF, але в фізичний канал CHAO.VAL значення не передається | |
| 4 | Перевірити значення змінних PLC.STA_PERM | біт про наявність імітованих об’єктів PLC.STA_PERM.X14=1 | |
| 6 | Відправити команду вимкнення імітації VARBUF.CMD=16#0312 | біт STA.SML повинен дорівнювати 0 |
|
| 7 | Змінити значення AOVAR_CFG.VAL | відповідне значення зміниться у AOVAR_HMI.VAL та VARBUF.VALR та в фізичному каналі CHAO.VAL | |
13 Функція фільтрації
| Номер | Дія для перевірки | Очікуваний результат | Примітки |
|---|---|---|---|
| 1 | Змінити значення часу фільтрації для тестової змінної AOVAR_CFG.T_FLT на 10000 мс | ||
| 2 | Змінити значення AOVAR_CFG.VAL | Значення АOVAR_CFG.VRAW поступово (за час встановлений в параметрі фільтрація) повинно змінитись відповідно до встановленого в каналі значення | |
| 3 | Повторити п2 для іншого значення AOVAR_CFG.T_FLT |
14 Виведення змінної з експлуатації
| Номер | Дія для перевірки | Очікуваний результат | Примітки |
|---|---|---|---|
| 1 | Змінити значення AOVAR1.VAL | AOVAR1.VRAW прийме відмаcштабоване значення та запишеться в фізичний канал CHАO.VAL | |
| 2 | Змінити параметр АOVAR_CFG.PRM.DSBL на 1 | біт АOVAR_CFG.STA.ENBL прийме значення 0, час кроку АOVAR_CFG.T_STEP1 онулиться і припинить відлік. значення АOVAR1.VRAW залишиться тим же, але в значення CHАO.VAL фізичного каналу не передаватиметься | |
| 3 | Змінити значення AOVAR1.VAL | AOVAR1.VRAW не прийме нове відмаcштабоване значення та не запишеться в фізичний канал CHАO.VAL | |
| 4 | Змінити параметр АOVAR_CFG.PRM.DSBL на 0 | біт АOVAR_CFG.STA.ENBL прийме значення 1, час кроку АOVAR_CFG.T_STEP1 почне відлік часу кроку. АOVAR_CFG.VRAW прийме нове відсмаштабоване значення, і передастся в значення CHАO.VAL фізичного каналу |
|
| 5 | Змінити значення AOVAR1.VAL | AOVAR1.VRAW прийме відмаcштабоване значення та запишеться в фізичний канал CHАO.VAL | |