PACFramework
Апаратурні процедури
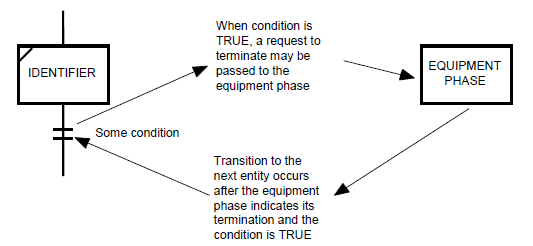
У процедурному керуванні згідно ISA-88 технологічна програма представляє собою сукупність процедур які координуючись виконують певну послідовність технологічних дій. Сама верхня процедура (процедура технологічної комірки, procedure) координує роботу процедур нижчого рівня (процедури технологічного вузла, unit procedure) які у свою чергу координують роботу операцій або/та етапів (operation/phase).
У ПЛК реалізовуються, так звані, апаратурні процедури (equipment procedure), в противагу рецептурним процедурам (recipe procedure), які тільки посилаються на апаратурні або координують роботу вбудованих процедур, які у свою чергу посилаються на апаратурні процедури. Апаратурні процедури в каркасі передбачається реалізовувати як функції. Процедури в стандарті також називають процедурними елементами, щоб посилатися на них як конструктивну одиницю процедур верхнього рівня.
Функції етапів, процедур технологічних вузлів, операцій, процедур технологічної комірки, повинні викликатися в кожному циклі незалежно тобто без вкладеності і без умов! Якщо процедура нічого не повинна виконувати, передбачено стан простою (IDLE)
Організація автомату станів для процедурного елементу
Згідно ISA-88 автомат станів для процедур означується довільно. Однак в рамках стандарту 2010-го року запропоновано 2 автомати станів, у якості прикладів. На рис.1 показаний автомат станів, який сформований комбінацією з цих 2-х. До першого (класичного) варіанту доданий стан "Запускається" і "Завершується".
На рис.1 введені групи станів run , actve і operate які не є окремими станами. Це зроблено для спрощення схеми, щоб показати дію команд, які працюють однаково на будь який стан з групи.
stateDiagram-v2
[*] --> Idle(Простій)
Idle(Простій) --> Starting(Запускається): Start
state operate {
state active {
state run{
Running(Виконується) --> Completing(Завершується)
Running(Виконується) --> Pausing(Призупиняється) : Pause
Pausing(Призупиняється) --> Paused(Пауза)
Paused(Пауза) --> Running(Виконується) : Resume
Starting(Запускається) --> Running(Виконується)
Restarting(Перезапускається) --> Running(Виконується)
}
Completing(Завершується)
Holding(Утримується)
Held(Утримуване)
state cmdHold <<join>>
run --> cmdHold
cmdHold --> Holding\n(Утримується) : Hold
Held(Утримуване) --> Restarting(Перезапускається) : Restart
Holding(Утримується) --> Held(Утримуване)
}
state cmdStop <<join>>
active --> cmdStop
cmdStop --> Stopping(Зупиняється) : Stop
Stopping(Зупиняється) --> Stopped(Зупинено)
}
Completing(Завершується) --> Complete(Завершено)
state cmdAbort <<join>>
operate --> cmdAbort
cmdAbort --> Aborting(Переривається) : Abort
Aborting(Переривається) --> Aborted(Перервано)
Stopped(Зупинено) --> Idle(Простій): Reset
Complete(Завершено) --> Idle(Простій) : Reset
Aborted(Перервано) --> Idle(Простій) : Reset
рис.1. Запропонований в каркасі автомат станів процедур.
Проміжні стани потрібні для синхронізації SCADA/HMI та ПЛК, а також між підсистемами (наприклад синхронізуються функції в різних ПЛК). Також проміжні стани дають можливість проводити реєстрацію переходів в журналах та базах даних. Розглянемо тепер цей автомат станів більш детально.
Коли процедурний елемент не виконується він знаходиться в стані ПРОСТІЙ (IDLE). Це пасивний стан, при якому як правило не відбувається ніякого керування. При ініціалізації системи, процедурний елемент переходить саме в цей початковий стан. Нормальне виконання передбачає послідовний перехід процедури в наступній послідовності станів:
stateDiagram-v2
direction LR
[*] --> IDLE
IDLE-->STARTING : START
STARTING --> RUNNING
RUNNING --> COMPLETING
COMPLETING --> COMPLETE
COMPLETE --> IDLE : RESET
Процедура запускається командою ЗАПУСТИТИ (START), яка наказує процедурному елементу почати виконувати логіку нормального ВИКОНАННЯ (RUNNING). Ця команда виконується лише у тому випадку, коли процедурний елемент знаходиться в стані ПРОСТІЙ (IDLE). Однак перед переходом в стан нормального функціонування, в каркасі передбачено проміжний стан ЗАПУСКАЄТЬСЯ(STARTING), де можна виконати логіку підготовчих робіт. Після виконання усіх необхідних дій відбувається завершення виконання, для чого виконується алгоритм стану COMPLETING (в ISA88 не передбачено). Коли алгоритм завершення виконано, процедурний елемент переходить в кінцевий стан COMPLETE. Цей стан необхідний для того, щоб процедурний елемент перед наступним запуском отримав команду RESET, що по факту підтверджує верхнім рівнем завершення. Зверніть увагу, що тільки два переходи відбуваються за зовнішніми для процедурного елементу командами, інші відбуваються за внутрішніх умов логіки процедурного елементу або процедурного елементу вищого рівня (наприклад умова переходу в процедурі на мові PFC). Перелік станів в нормальному переході:
- ПРОСТІЙ (IDLE): Пасивний стан, при якому як правило не відбувається ніякого керування. Процедурний елемент чекає команди ЗАПУСТИТИ (START), яка викликає перехід в стан ЗАПУСКАЄТЬСЯ(STARTING);
- ЗАПУСКАЄТЬСЯ(STARTING): виконується алгоритм запуску, наприклад підготовчі роботи до переходу в нормальний стан виконання. При спрацюванні внутрішніх умов, наприклад виконанні всіх підготовчих робіт, відбувається перехід в стан ВИКОНУЄТЬСЯ (RUNNING);
- ВИКОНУЄТСЯ (RUNNING): Нормальне функціонування. Тут виконується основний алгоритм керування технологічним процесом. Якщо спрацьовує внутрішня умова завершення, відбувається перехід в стан ЗАВЕРШУЄТЬСЯ (COMPLETING);
- ЗАВЕРШУЄТЬСЯ (COMPLETING): При нормальному функціонуванні виникла умова завершення, у цьому стані виконується алгоритм завершення. Коли спрацьовує внутрішня умова завершення, відбувається перехід в стан ЗАВЕРШЕНО (COMPLETE);
- ЗАВЕРШЕНО (COMPLETE): Нормальне функціонування дійшло до кінцевого стану завершення. Під час цього стану як правило нічого не відбувається з процесом. Процедурний елемент чекає команду СКИНУТИ (RESET), що викличе перехід в стан ПРОСТІЙ (IDLE);
За наявності короткочасних проблем, які потребують спеціальної логіки керування, наприклад пов’язаною з тимчасовою відсутністю сировини, процедурний елемент може перебувати в с стані ПАУЗА (PAUSED). Стандартом та в каркасі передбачено проміжний стан PAUSING, куди переводиться процедурний елемент, якщо прийшла відповідна команда PAUSE. Після проведення проміжних дій, за внутрішньою логікою процедурний елемент переводиться в стан PAUSED. Вихід зі стану PAUSED в RUNNING проводиться за команди RESUME.
stateDiagram-v2
direction LR
RUNNING --> PAUSING : PAUSE
PAUSING --> PAUSED
PAUSED --> RUNNING : RESUME
Згідно стандарту:
-
ПРИЗУПИНЯЄТЬСЯ (PAUSING): процедурний елемент або апаратурний об’єкт отримав команду ПАУЗА (PAUSE). Це викличе зупинку виконання процедурного елементу на наступному означеному безпечному або стійкому місці в її логіці нормального виконання. Після зупинки відбувається перехід в ПАУЗА (PAUSED);
-
ПАУЗА (PAUSED): Після того, як виконання процедурного елементу зупинилося на означеному безпечному місці, стан змінюється в ПАУЗА (PAUSED). Це стан, як правило, використовується для короткострокових зупинок. Запуск команди ВІДНОВИТИ (RESUME) приводить до переходу в стан ВИКОНУЄТСЯ (RUNNING), продовжуючи виконання відразу після означеного місця зупинки;
На відміну від паузи стан УТРИМУВАНЕ (HELD) передбачений для виконання алгоритмів роботи при довгостроковій зупинці процедурного елементу. Наприклад, якщо необхідно перейти в режим тривалого зберігання продукту, до повторного його оброблення в стані RUNNING. Перехід до проміжного стану HOLDING відбувається з будь якого стану групи run за отримання команди HOLD. Вихід зі стану HELD відбувається по команді RESTART через проміжний стан RESTARTING. Алгоритм RESTARTING повинен вивести процедурний елемент до стану RUNNING, тому його алгоритм може бути схожим на алгоритм STARTING. Слід звернути увагу, що перехід в HELD робиться зі всіх станів групи run , у тому числі STARTING.
stateDiagram-v2
direction LR
state run {
Runnung
}
state cmdHold <<join>>
run --> cmdHold
cmdHold --> HOLDING : HOLD
HELD --> RESTARTING : RESTART
HOLDING--> HELD
RESTARTING --> Runnung
Згідно стандарту:
-
УТРИМУЄТЬСЯ (HOLDING): процедурний елемент отримав команду УТРИМУВАТИ (HOLD) і виконує виконання логіки УТРИМУЄТЬСЯ (HOLDING) для переведення його або апаратурного об’єкту у необхідний стан. Якщо ніякого виконання послідовності не потрібно, то процедурний елемент або апаратурний об’єкт негайно переходить в стан УТРИМУВАНЕ (HELD);
-
УТРИМУВАНЕ (HELD): процедурний елемент завершив логіку стану УТРИМУЄТЬСЯ (HOLDING) і був доведений до відомого запланованого стану, який як правило, використовується для довгострокової зупинки. Процедурний елемент або апаратурний об’єкт чекає наступної команди, щоб продовжити;
-
ПЕРЕЗАПУСКАЄТЬСЯ (RESTARTING): процедурний елемент отримав команду ПЕРЕЗАПУСТИТИ (RESTART) в той час як знаходився в стані УТРИМУВАНЕ (HELD). Він виконує свою логіку перезапуску, щоб повернутися в стан нормальної роботи;
У стандарті не чітко означено призначення команди STOP, так як вона може бути як штатною так і нештатною. У PACFramework команда STOP передбачається тільки для нештатної зупинки. Для штатної зупинки виконується команда верхньо-рівневого керування, яка переводить процедурний елемент зі стану RUNNING в COMPLETING, і з точки зору стандарту вважається внутрішньою умовою. Нижче про це буде написано детальніше. Фрагмент автомату станів показаний на рисунку:
stateDiagram-v2
direction LR
[*] --> IDLE
IDLE --> active
active: active\n(усі стани з групи)
state cmdStop <<join>>
active --> cmdStop
cmdStop --> STOPPING : STOP
STOPPING --> STOPPED
STOPPED --> IDLE : RESET
З будь якого стану з групи active при відправленні команди STOP відбувається перехід до стану STOPPING, в якому реалізований алгоритм нештатної зупинки. По завершенню алгоритму, процедурний елемент переходить в кінцевий стан STOPPED. Цей стан аналогічно як і COMPLETE необхідний для того, щоб процедурний елемент перед наступним запуском отримав команду RESET, що по факту підтверджує верхнім рівнем завершення виконання процедурного елементу. Згідно стандарту:
-
ЗУПИНЯЄТЬСЯ (STOPPING): процедурний елемент отримав команду СТОП (STOP) і виконується логіка, що виконує нормальну керовану зупинку. Якщо послідовність виконання не потребується, тоді процедурний елемент або апаратурний об’єкт негайно переходить в стан ЗУПИНЕНО (STOPPED);
-
ЗУПИНЕНО (STOPPED): процедурний елемент завершив логіку стану ЗУПИНЯЄТЬСЯ (STOPPING) та чекає команди СКИНУТИ (RESET) для переходу в стан ПРОСТІЙ (IDLE);
Окрім нештатної зупинки, в стандарті передбачено швидке переривання виконання за отримання команди ABORT. Можна вважати що це аналогічно швидкій відмові від виконання функціонального елементу, тобто виходу зі станів функціонування (група станів operate) без контролю завершення дій або навіть без будь яких дій. Можна використати це для “Антизависання”, наприклад якщо умова завершення нездійснена припустимо зламаний кінцевик клапану (хоч в каркасі є інший механізм виходу з цієї ситуації), або в процесі налагодження виявилося невірна реалізація якогось кроку. Тим не менше стандарт передбачає проміжний стан ABORTING, де можна зробити певні швидкі дії. Після завершення усіх дій ABORTING процедурний елемент переходить в кінцевий стан ABORTED. Цей стан аналогічно як і COMPLETE та STOPPED і необхідний для того, щоб процедурний елемент перед наступним запуском отримав команду RESET, що по факту підтверджує верхнім рівнем завершення виконання процедурного елементу.
stateDiagram-v2
direction LR
[*] --> IDLE
IDLE --> operate
operate: operate (усі стани з групи та підгруп)
state cmdStop <<join>>
operate --> cmdStop
cmdStop --> ABORTING : ABORT
ABORTING --> ABORTED
ABORTED --> IDLE : RESET
Згідно стандарту:
-
ПЕРЕРИВАЄТЬСЯ (ABORTING): процедурний елемент отримав команду ПЕРЕРВАТИ (ABORT) для виконання логіки ПЕРЕРИВАЄТЬСЯ (ABORTING), що сприяє більш швидкій, але не обов’язково керованій ненормальній зупинці. Якщо послідовне виконання не потрібне, процедурний елемент негайно переходить до стану ПЕРЕРВАНО (ABORTED);
-
ПЕРЕРВАНО (ABORTED): процедурний елемент завершив логіку стану ПЕРЕРИВАЄТЬСЯ (ABORTING) і чекає команди СКИНУТИ (RESET) для переходу в ПРОСТІЙ (IDLE).
Згідно стандарту команди:
-
ЗАПУСТИТИ (START): ця команда наказує процедурному елементу почати виконувати логіку нормального ВИКОНАННЯ (RUNNING). Ця команда виконується лише у тому випадку, коли процедурний елемент знаходиться в стані ПРОСТІЙ (IDLE);
-
ЗУПИНИТИ (STOP): ця команда наказує процедурному елементу виконати логіку ЗУПИНЯЄТЬСЯ (STOPPING). Ця команда виконується лише в тому випадку, коли процедурний елемент знаходиться в станах ВИКОНУЄТСЯ (RUNNING), ПРИЗУПИНЯЄТЬСЯ (PAUSING), ПАУЗА (PAUSED), УТРИМУЄТЬСЯ (HOLDING), УТРИМУВАНЕ (HELD), або ПЕРЕЗАПУСКАЄТЬСЯ (RESTARTING);
-
УТРИМУВАТИ (HOLD): ця команда наказує процедурному елементу виконати логіку УТРИМУЄТЬСЯ (HOLDING). Ця команда виконується лише в тому випадку, коли процедурний елемент знаходиться в станах ВИКОНУЄТСЯ (RUNNING), ПРИЗУПИНЯЄТЬСЯ (PAUSING), ПАУЗА (PAUSED) або ПЕРЕЗАПУСКАЄТЬСЯ (RESTARTING);
-
ПЕРЕЗАПУСТИТИ (RESTART): ця команда наказує процедурному елементу виконати логіку ПЕРЕЗАПУСКАЄТЬСЯ (RESTARTING) – безпечного повернення до стану ВИКОНУЄТСЯ (RUNNING). Ця команда виконується лише під час стану процедурного елементу УТРИМУВАНЕ (HELD);
-
ПЕРЕРВАТИ (ABORT): ця команда наказує процедурному елементу виконати логіку ПЕРЕРИВАЄТЬСЯ (ABORTING). Команда виконується у будь-якому стані, за винятком ПРОСТІЙ (IDLE), ЗАВЕРШЕНО (COMPLETED), ПЕРЕРИВАЄТЬСЯ (ABORTING) і ПЕРЕРВАНО (ABORTED);
-
СКИНУТИ (RESET): ця команда викликає перехід до стану ПРОСТІЙ (IDLE). Вона виконується тільки при станах ЗАВЕРШЕНО (COMPLETE), ПЕРЕРВАНО (ABORTED) та ЗУПИНЕНО (STOPPED);
-
ПРИЗУПИНИТИ (PAUSE): ця команда наказує процедурному елементу зробити паузу для наступного запрограмованого переходу в межах його логіки послідовності виконання і чекає команди ВІДНОВИТИ (RESUME), перш ніж продовжити. Ця команда діє тільки в стані ВИКОНУЄТСЯ (RUNNING);
-
ВІДНОВИТИ (RESUME): ця команда наказує процедурному елементу, який знаходиться в стані ПАУЗА (PAUSE) із-за команди ПАУЗА (PAUSE) або із-за режиму покрокового виконання, відновити виконання. Ця команда застосовується лише тоді, коли процедурний елемент знаходиться в стані ПАУЗА (PAUSED).
Змінні в каркасі, що зв’язані з процедурним елементом
З процедурним елементом зв’язано кілька змінних різних типів:
- Структура PROC_CFG - використовується для зберігання типових конфігурованих даних процедури, контролю та керування з боку програми ПЛК. Може використовуватися також для буферного обміну зі SCADA/HMI.
- Структура PROC_HMI використовується для контролю/керування станом процедури з HMI.
- Структура PROC_CTRL використовується для контролю та керування роботою процедури в програмі ПЛК з процедур того самого або верхнього рівня.
- параметрична змінна, яка конфіугурує та контролює параметри процесу для конкретного процедурного елементу, що пов’язані з рецептом
- змінні вводу/виводу, що є вхідними та вихідними для процедури (як правило різноманітні CM)
Детальніше ці змінні розглянуті нижче.
Представлення станів в каркасі (STEP1)
Усі стани описані вище представлені в каркасі кількома змінними:
PROC_CFG.STEP1- крокове представлення стану, основне місце зберігання. Керується автоматом станів в рушіїPROC_MACH(описаний нижче)- поля
PROC_CTRLз префіксомSTA- віддзеркаленняPROC_CFG.STEP1для зручності використання. Змінюються в рушіїPROC_MACH(описаний нижче), у інших місцях доступні тільки для читання. PROC_HMI.STEP1- копіяPROC_CFG.STEP1, доступна в HMI тільки для читання
У таблиці наведені ці стани, а також додаткові згортки станів для зручності використання в реалізації алгоритмів.
Назва бітового поля в PROC_CTRL |
Значення STEP1 | Назва стану | Примітка |
|---|---|---|---|
| 0 | ініціалізація (не є станом) | у інших випадках некоректне значення | |
| STA_RUNNING | 2 | RUNNING | |
| STA_IDLE | 1 | IDLE | |
| STA_RESUMING | 15 | RESUMING | За необхідності перехідного стану PAUSED -> RUNNING. У стандартному рішенні відсутній |
| STA_PAUSING | 3 | PAUSING | |
| STA_PAUSED | 4 | PAUSED | |
| STA_HOLDING | 5 | HOLDING | |
| STA_HELD | 6 | HOLD | |
| STA_RESTARTING | 7 | RESTARTING | |
| STA_COMPLETE | 8 | COMPLETE | |
| STA_STOPPING | 9 | STOPPING | |
| STA_STOPPED | 10 | STOPPED | |
| STA_ABORTING | 11 | ABORTING | |
| STA_ABORTED | 12 | ABORTED | |
| STA_STARTING | 13 | STARTING | |
| STA_COMPLETING | 14 | COMPLETING | |
| STA_NOTWRK | - | будь з яких кінцевих станів = STA_COMPLETE OR STA_STOPPED OR STA_ABORTED OR STA_IDLE | |
| STA_WRK | - | будь яких з робочих станів = STA_RUNNING OR STA_STARTING OR STA_COMPLETING |
Умови переходу між станами в каркасі
Умови переходу спрацьовують при одній із або комбінації наступних типів подій:
- надсилання команди з верхньорівневого процедурного елементу за зміни стану: якщо процедурний елемент є частиною іншої процедури і її виконання передбачає керування станом цього елементу
- надсилання команди з засобів HMI
- внутрішня логіка процедурного елементу
Команди верхньорівневого керування та активація умови переходу внутрішньою логікою реалізовані через структурну змінну PROC_CTRL. Команди з засобів HMI передаються через поле в типі змінної PROC_HMI (тобто PROC_HMI.CMD).
Наступні команди в переліку означені в стандарті, і описані вище. В каркасі вони реалізовані як булеві поля структурної змінної, які мають префікс CMD_ і можуть відправлятися з верхньорівневого процедурного елементу. Для них є аналогічний код команди в PROC_HMI.CMD. Пізніше буде описаний типовий підхід в каркасі для мінімізації цих команд (групування).
Назва команди / поля в PROC_CTRL |
Значення PROC_HMI.CMD |
Призначення |
|---|---|---|
| CMD_START | 1 | ЗАПУСТИТИ (START) |
| CMD_RESUME | 2 | ВІДНОВИТИ (RESUME) |
| CMD_RESTART | 5 | ПЕРЕЗАПУСТИТИ (RESTART) |
| CMD_PAUSE | 3 | ПРИЗУПИНИТИ (PAUSE) |
| CMD_HOLD | 6 | УТРИМУВАТИ (HOLD) |
| CMD_STOP | 7 | ЗУПИНИТИ (STOP) |
| CMD_ABORT | 8 | ПЕРЕРВАТИ (ABORT) |
| CMD_RESET | 4 | СКИНУТИ (RESET) |
Інші умови переходу представлені булевими полями змінної типу PROC_CTRL і мають суфіксі _CMPLT. Усі булеві поля крім HL_RUNNING_CMPLT викликані внутрішньою логікою виконання процедурного елементу, тобто змінюються всередині процедурного елементу.
Назва поля PROC_CTRL |
Призначення | Місце переходу |
|---|---|---|
| STARTING_CMPLT | умова переходу на RUNNING виконана | STARTING -> RUNNING |
| HL_RUNNING_CMPLT | cпрацювала зовнішня (верхньорівнева) умова завершення, треба опрацьовувати RUNING_CMPLT. HL (HighLevel) потрібна для нормального завершення нижньорівневого процедурного елементу, при спрацюванні умови переходу у верхньорівневій процедурі. | RUNNING -> COMPLETING |
| RUNING_CMPLT | процедура завершилася (спрацювала внутрішня умова завершення) | RUNNING -> COMPLETING |
| COMPLETING_CMPLT | умова переходу на COMPLETE виконана | COMPLETING -> COMPLETE |
| PAUSING_CMPLT | умова переходу на PAUSED виконана | PAUSING -> PAUSED |
| RESTARTING_CMPLT | умова переходу на RUNNING з HOLD виконана | RESTARTING -> RUNNING |
| RESUMING_CMPLT | умова переходу на RUNNING з RESUMING виконана. Потрібна тільки при наявності додаткового стану RESUMING. В стандартній версії каркасу не використовується. | RESUMING -> RUNNING |
| HOLDING_CMPLT | умова переходу на HOLD з RUNNING виконана | HOLDING -> RUNNING |
| STOPPING_CMPLT | умова переходу на STOP виконана | STOPPING -> STOPPED |
| ABORTING_CMPLT | умова переходу на ABORT виконана | ABORTING -> ABORTED |
Біт RUNING_CMPLT призначений для формування внутрішньої умови завершення процедури. При створенні рецептурної процедури на PFC, це створює так званий неявний перехід. Для рушія автомату станів функції PROC_MACH (описано нижче) це є зовнішнім сигналом, тому як задається в основній логіці процедурного елементу.
Біт HL_RUNNING_CMPLT призначений для формування зовнішньої умови завершення процедури. Це зовнішня команда від верхнього рівня керування, наприклад рецептурної процедури. Це може задавати явний перехід. У логіці PROC_MACH цей біт не використовується, він обробляється в логіці процедури, а потім скеровує RUNING_CMPLT. Приклад наведено в наступному підрозділі.
PROC_CTRL.ENBL та PROC_CTRL.DSBL_COMPLETE
Біт PROC_CTRL.ENBL дає можливість заблокувати запуск процедури (з IDLE->Staring), за певних умов. Цей біт може виставлятися як з логіки процедури, так і з логіки верхнього рівня керування, зокрема з використанням базових функцій. Тобто рушій автомату станів процедури не зреагує на команду CMD_START, якщо PROC_CTRL.ENBL=FALSE, також будуть проігноровані усі команди з HMI.
Біт PROC_CTRL.DSBL_COMPLETE може використовуватися для утримання завершення виконання RUNNING навіть якщо біт RUNING_CMPLT має значення 1. Це необхідно у випадку, якщо перехід треба зробити при RUNING_CMPLT=TRUE AND PROC_CTRL.DSBL_COMPLETE=FALSE . Даний біт не є стандартним для каркасу і вводиться за необхідності.
Біти STA_NOTWRK і STA_WRK спрощують контроль за процедурою і використовуються в логіці.
| Атрибут PROC_CTRL | Біт STA | Опис | Примітка |
|---|---|---|---|
| ENBL | 14 | дозвіл на активацію процедури | в HMI тільки для читання |
| DSBL_COMPLETE | - | заборона завершення (наприклад за необхідності очікування умови переходу з процедури верхнього рівня) | Не є стандартним для каркасу |
Кроки (STEP) та часи кроків (T_STEP)
Структурні змінні типу PROC_CFG та PROC_HMI містять поля кроків та часів кроків.
STEP1 описаний вище і вказує на стан процедурного елементу. Тоді як STEP2 - це крок процедурного елементу. Для зручності налагодження кроки нумеруються наскрізно через всі стани. Таким чином стан можна також визначити за номером кроку.
T_STEP1 - вказує на час стану RUNNING в мс. в усіх інших проміжних і кінцевих станах час не рахується. При переході в IDLE і HOLDING скидається в 0.
T_STEP2 - вказує на час кроку у всіх станах за винятком IDLE, де він = 0.
| Поле | Тип | Призначення | Примітка |
|---|---|---|---|
| STEP1 | INT | основне значення стану | |
| STEP2 | INT | крок всередині стану | дискретність кроків по станам 1000 (15 станів – 1000 - 15000) |
| T_STEP1 | UDINT | час виконання процедури в мс | рахується знаходження тільки в стані Running, в Paused як правило заморожується, в Holding обнуляється. |
| T_STEP2 | UDINT | час виконання кроку процедури в мс | в IDLE = 0 |
За необхідності виконання кількох паралельних кроків, варто створювати окремі процедурні елементи, які будуть виконуватися паралельно. Іншого варіанту каркасом не передбачено.
Керування та контроль з HMI та режими
Зовнішній вигляд
Усі стани, режими та тривоги видимі у відповідному вікні керування. Також там доступні команди керування.
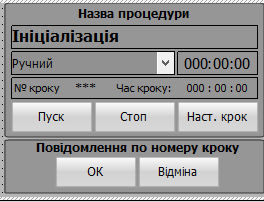
Стани підсвічуються кольором (або відтінком білого) та відповідним текстом стану. Також виводиться час стану.
Для кроку виводиться номер кроку, текст та час кроку. Передбачено що для кожного номеру кроку буде своє текстове повідомлення, яке буде виводитися на екран. Для утиліт автоматичного розвертання рекомендується щоб ці повідомлення записувалися як коментар біля номеру кроку в структурі CASE.
Кнопки керування реалізують команди керування та ховаються або показуються в залежності від режимів та станів.
Команди з HMI
Керування передбачає такі кнопки:
ПУСК- реалізує кілька команд в залежності від стану (згортка команд):- CMD_START
- CMD_RESTART
- CMD_RESET
- CMD_RESUME
СТОП- реалізує CMD_STOPПАУЗА(за необхідності) - реалізує CMD_PAUSEУТРИМ.(за необхідності) - реалізує CMD_HOLDПЕРЕРВ.(за необхідності, обмеження доступу) - реалізує CMD_ABORT
Усі наведені команди необхідно реалізовувати з підтвердженням для усунення випадкових дій.
Наступні команди є опційними і дають можливість реалізації ручного керування виконанням процедури. Реалізація їх залежить від проекту і тому не може бути частиною каркасу. Але їх перелік та деяка частина функціональності реалізовані. Зокрема в функції PROC_TRANS_A та PROC_TRANS_M:
Наст. крок(CMD_NEXT) - команда переходу до наступного кроку без очікування умови завершення. Може залежати від вибраного режиму керування процедурним елементом.ОК(CMD_OK) - підтвердити дію: для ручних операцій або команд підтвердження повідомлення (умова заверешення кроку). Передбачається що видимість кнопки не залежить від режиму виконання процедурного елементу а використовується виключно для ручних процедур.ВІДМІНА(CMD_CANCEL) - негативне підтвердження (відміна) у випадку ручної операції. Передбачається що видимість кнопки не залежить від режиму виконання процедурного елементу а використовується виключно для ручних процедур.
Усі команди перед виконанням проходять попередню перевірку на можливість виконання. Для контролю дозволу виконання команд в HMI відправляються статусні біти, що вказують на цей дозвіл. Відповідна кнопка може бути деактивована, якщо немає дозволу на виконання цієї команди.
Режими
У каркасі передбачені режими керування процедурним елементом відповідно до стандарту ISA-88:
- ручний (MAN)
- автоматичний (AUTO)
- напівавтоматичний (SEMI)
У автоматичному режимі забороняється керувати станами процедурного елементу з HMI, тобто усі кнопки керування станом відключені. Якщо процедурний елемент керується верхньорівневим елементом, то той спочатку (перед запуском процедурного елементу) може перевести процедурний елемент в автоматичний режим щоб за замовченням той був повністю керованим тільки цим верхньорівневим елементом.
Інші вимоги до реалізації режимів наразі виходять за рамки PACFramework, так як можуть керуватися зовнішніми рушіями (реалізацією процедурного елементу). Вони можуть впливати на поведінку переходів між кроками станів. Це повинно бути оговорено при описі технічних вимог. Наприклад, переходи між кроками в середині процедурного елементу можуть спрацьовувати в залежності від режиму наступними способами:
1) - в автоматичному режимі - тільки за умови виконання,
- в ручному режимі - тільки за умови відправки
CMD_NEXT - в напівавтоматичному - автоматично або за умови відправки
CMD_NEXT; між станами за умови виконання ТА відправкиCMD_NEXT2) - в автоматичному режимі - тільки за умови виконання, - в ручному режимі - за умови виконання АБО відправки
CMD_NEXT - в напівавтоматичному - за умови виконання ТА відправки
CMD_NEXT
Переведення процедурного елементу з режиму в режим повинно фіксуватися в журналі подій.
Тривоги
У каркасі передбачені такі стандартні тривоги:
- TMAXERR – помилка максимуму часу виконання процедурного елементу, тобто час T_STEP1 більше максимально заданого
PRC_CFG.TMAX - TMINERR - помилка мінімуму часу виконання, час T_STEP1 менше мінімально заданого
PRC_CFG.TMIN - STA_ALM - загальна тривога пов’язана з процедурним елементом, помилка часу або інша тривога (означується алгоритмом)
Конкретну технологічно тривогу, що означується в технологічному процедурному елементі, можна визначити за номером кроку (як варіант реалізації). Тобто для конкретної тривоги буде виділений окремий крок.
Біти станів та режимів STA
Значення основного стану процедурного елементу вказується в STEP1. Але з процедурою зв’язані інші функціональні елементи. Їх значення компонується в STA, тобто PROC_CFG.STA та PROC_HMI.STA.
| Назва біту | Номер біту STA | Призначення | Примітка |
|---|---|---|---|
| ENCMD_START | 0 | =1, дозвіл на команду HMI START | керується рушієм PROC_MACH |
| ENCMD_PAUSE | 1 | дозвіл на команду HMI PAUSE | керується рушієм PROC_MACH |
| ENCMD_RESET | 2 | дозвіл на команду HMI RESET | керується рушієм PROC_MACH |
| ENCMD_HOLD | 3 | дозвіл на команду HMI HOLD | керується рушієм PROC_MACH |
| ENCMD_STOP | 4 | дозвіл на команду HMI STOP | керується рушієм PROC_MACH |
| ENCMD_CANCEL | 5 | дозвіл на команду HMI негативне підтвердження (відміна) ручної операції | керується основним алгоритмом |
| ENCMD_NEXT | 6 | дозвіл на команду HMI перейти до наступного кроку | керується основним алгоритмом |
| ENCMD_OK | 7 | дозвіл на команду HMI підтвердити дію | керується основним алгоритмом |
| TMAXERR | 8 | помилка максимуму часу виконання, час більше максимуму | |
| TMINERR | 9 | помилка мінімуму часу виконання, час менше мінімуму | |
| STA_ALM | 10 | наявність помилки процедури | |
| SEMI | 11 | =1 напівавтоматичний режим | AUTO = NOT MAN AND NOT SEMI |
| INBUF | 12 | зайнятість буферу | |
| MAN | 13 | =1, ручний режим | AUTO = NOT MAN AND NOT SEMI |
| ENBL | 14 | дозвіл на запуск | |
| CMD_BUF | 15 | завантажити в буфер | тільки PROC_HMI.STA |
Організація функції процедурного елементу
Процедурний елемент реалізовується через функцію, яка повинна викликатися в задачі контролера без умов. Аргументами функції є:
- ID - унікальний ідентифікатор процедури (передається на вхід для зручності читання програми і надійності)
- змінні типу PROC_CFG
- змінні типу PROC_HMI
- змінні типу PROC_CTRL
- параметрична змінна PARA
- змінні вводу/виводу IO
Опис змінних наведений вище.
Для спрощення обробки типових команд та автомату станів, в каркасі передбачена функція PROC_MACH, яка виконує типові операції.
flowchart LR
ID --> PROCEDURE
PRCFG <--> PROCEDURE
PRCHMI <--> PROCEDURE
PRCCTRL <--> PROCEDURE
PRCBUF <--> PROCEDURE
PARA <--> PROCEDURE
IO <--> PROCEDURE
subgraph PROCEDURE
direction TB
proc_logic[Лолгіка\n процедури]
subgraph PROC_MACH
state_machine[Логіка\n Автомату станів]
end
proc_logic --- PROC_MACH
end
Таким чином програма будь-якої процедури включає в себе наступні частини:
- обробка логіки специфічної для даної процедури
- обробка автомату станів -
PROC_MACH
Змінні
PROC_CFG
Головна структура (тип) яка використовується для зберігання конфігурованих даних процедури, контролю та керування з боку програми ПЛК. Може використовуватися також для буферного обміну зі SCADA/HMI.
| Атрибут | Тип | Опис | Примітка |
|---|---|---|---|
| ID | UINT | ідентифікатор | |
| CLSID | UINT | CLSID | |
| STA | UINT/INT | наведений вище | |
| CMD | UINT/INT | Команди (далі числові значення): | |
| 1 – START (запустити процедуру) | |||
| 2 – RESUME (відновити, продовжити) | |||
| 3 – PAUSE (призупинити) | |||
| 4 – RESET (скинути) | |||
| 5 – RESTART (перезапустити) | |||
| 6 – HOLD (утримувати) | |||
| 7 – STOP (зупинити виконання процедури) | |||
| 8 – ABORT (перервати) | |||
| 9 – CMPLT (завершити перехідний стан – для налагодження) | |||
| 16#A..F - резерв | |||
| 16#0100 – прочитати конфігурацію з буферу (256) | |||
| 16#0101 – записати конфігурацію в буфер (257) | |||
| 16#102 - перевести в автоматичний режим< | |||
| 16#103 - перевести в ручний режим | |||
| 16#104 - переключити ручний режим на зворотній | |||
| 16#105 - переключити в напівавтоматичний (програмний) режимc | |||
| 16#0200 – CMD_NEXT (HMI - перейти до наступного кроку T_STEP2, пропустити умову переходу) X6, реалізовується в основній програмі процедурного елементу | |||
| 16#0300 – команда підтвердження дій CMD_OK, реалізовується в основній програмі процедурного елементу | |||
| 16#0301 - CANCEL (HMI - негативне пітвердження (відміна) ручної операції), реалізовується в основній програмі процедурного елементу | |||
| 2000…3000 (16#7D0 - 16#BB8) - перейти на відповідний крок, реалізовується в основній програмі процедурного елементу | |||
| PRM | INT | бітові параметри (далі набір бітів) | |
| X7 AMAXENBL – активувати тривогу по максимуму часу виконання | |||
| X8 AMINENBL – активувати тривогу по мінімуму часу виконання | |||
| X9 HMIMIN – =1 - відображення часу на ЛМІ в годинах/хвилинах, | |||
| rez1 | INT | для вирівнювання | |
| STEP1 | INT | крок стану | |
| 0 – ініціалізація (тільки при старті ПЛК) | рожевий | ||
| 1 – Idle (простій) | прозорий | ||
| 13 – Starting (запускається) | світлосірий, круг з трикутником | ||
| 2 - Running (виконується) | білий, круг з трикутником | ||
| 14 - Completing (завершується) | світлосірий, круг з галочкою | ||
| 3 – Pausing (призупиняється) | світложовтий, круг з двома паралельними (пауза) | ||
| 4 – Paused (пауза) | жовтий, круг з двома паралельними (пауза) | ||
| 5 – Holding (утримується) | світло-коричневий , круг з ромбом | ||
| 6 – Hold (утримуване) | коричневий, круг з ромбом | ||
| 7 – Restarting (перезапускається) | бежевий, круг з трикутником | ||
| 8 – Complete (завершено) | сірий, круг з галочкою | ||
| 9 – Stopping (зупиняється) | світлочервоний, квадрат з квадратом (стоп) | ||
| 10 – Stopped (зупинено) | темно-червоний, квадрат з квадратом (стоп) | ||
| 11 – Aborting (переривається) | розовий, ромб | ||
| 12 – Aborted (перервано) | бузковий, ромб з квадратом | ||
| STEP2 | INT | крок всередині стану дискретність кроків по станам 1000 (15 станів – 1000 - 15000): | |
| 0 – ініціалізація (тільки при старті ПЛК) | |||
| 1000 – Idle (простій) | |||
| 13000 – Starting (запускається) | |||
| 2000 - Running (виконується) | |||
| 14000- Completing (завершується) | |||
| 3000 – Pausing (призупиняється) | |||
| 4000 – Paused (призупинено) | |||
| 5000 – Holding (утримується) | |||
| 6000 – Hold (утримуване) | |||
| 7000 – Restarting (перезапускається) | |||
| 8000 – Complete (завершено) | |||
| 9000 – Stopping (зупиняється) | |||
| 10000 – Stopped (зупинено) | |||
| 11000 – Aborting (переривається) | |||
| 12000 – Aborted (перервано) | |||
| - кроки в станах робити з дискретністю 10, щоб можна було вставляти додаткові - для кожного стану, в кроках робити один перший крок – ініціалізації, в якому робляться дії один раз на цикл |
|||
| T_STEP1 | UDINT | час виконання процедури (знаходження в Running) в мс | |
| T_STEP2 | UDINT | час виконання кроку процедури в мс | |
| TMIN | UDINT | обмеження по мінімуму часу виконання, с | |
| TMAX | UDINT | обмеження по максимуму часу виконання, с |
PROC_HMI
Структура PROC_HMI використовується для контролю/керування станом процедури з HMI.
| Атрибут | Тип | Опис |
|---|---|---|
| STA | UINT/INT | Повторює аналогічний в PROC_CFG.STA |
| CMD | UINT/INT | Аналогічно PROC_CFG.CMD |
| STEP1 | INT | Повторює PROC_CFG.STEP1 |
| STEP2 | INT | Повторює PROC_CFG.STEP2 (опціонально, якщо необхідно бачити внутрішню структуру для детального журналювання) |
| T_STEP1 | UDINT | Повторює PROC_CFG.T_STEP1 |
| T_STEP2 | UDINT | Повторює PROC_CFG.T_STEP2 |
PROC_CTRL
Структура PROC_CTRL використовується для контролю та керування роботою процедури в програмі ПЛК з процедур того самого або верхнього рівня.
| Атрибут | Тип | Опис |
|---|---|---|
| ENBL | Bool | IN дозвіл на активацію процедури |
| PAUSING_CMPLT | Bool | IN умова переходу на PAUSED виконана |
| RUNING_CMPLT | Bool | IN процедура завершилася (спрацювала внутрішня умова завершення). Враховуючи що стандартний автомат станів не передбачає такої команди вона була введена в каркасі для обробки стандартних умов. Самі умови формуються поза функцією PROC_MACH |
| HL_RUNNING_CMPLT | Bool | IN cпрацювала зовнішня умова завершення, треба опрацьовувати RUNING_CMPLT. HL (HighLevel) потрібна для нормального завершення нижньої процедури, при спрацюванні умови переходу. |
| RESTARTING_CMPLT | Bool | IN умова переходу на RUNNING з HOLD виконана |
| RESUMING_CMPLT | Bool | IN умова переходу на RUNNING з RESUMING виконана |
| HOLDING_CMPLT | Bool | IN умова переходу на HOLD з RUNNING виконана |
| STOPPING_CMPLT | Bool | IN умова переходу на STOP виконана |
| ABORTING_CMPLT | Bool | IN умова переходу на ABORT виконана |
| STARTING_CMPLT | Bool | IN умова переходу на RUNNING виконана |
| COMPLETING_CMPLT | Bool | IN умова переходу на COMPLETE виконана |
| CMD_START | Bool | IN програмна команда START |
| CMD_RESUME | Bool | IN програмна команда RESUME |
| CMD_RESTART | Bool | IN програмна команда RESTART |
| CMD_PAUSE | Bool | IN програмна команда PAUSE |
| CMD_HOLD | Bool | IN програмна команда HOLD |
| CMD_STOP | Bool | IN програмна команда STOP |
| CMD_ABORT | Bool | IN програмна команда ABORT |
| CMD_RESET | Bool | IN програмна команда RESET |
| STA_RUNNING | Bool | OUT стан RUNNING |
| STA_IDLE | Bool | OUT стан IDLE |
| STA_RESUMING | Bool | OUT стан RESUMING |
| STA_PAUSING | Bool | OUT стан PAUSING |
| STA_PAUSED | Bool | OUT стан PAUSED |
| STA_HOLDING | Bool | OUT стан HOLDING |
| STA_HOLD | Bool | OUT стан HOLD |
| STA_RESTARTING | Bool | OUT стан RESTARTING |
| STA_COMPLETE | Bool | OUT стан COMPLETE |
| STA_STOPPING | Bool | OUT стан STOPPING |
| STA_STOPPED | Bool | OUT стан STOPPED |
| STA_ABORTING | Bool | OUT стан ABORTING |
| STA_ABORTED | Bool | OUT стан ABORTED |
| STA_STARTING | Bool | OUT стан STARTING |
| STA_COMPLETING | Bool | OUT стан COMPLETING |
| STA_NOTWRK | Bool | OUT стан будь з яких кінцевих станів = STA_COMPLETE OR STA_STOPPED OR STA_ABORTED OR STA_IDLE |
| STA_WRK | Bool | OUT стан будь яких з робочих станів = STA_RUNNING OR STA_STARTING OR STA_COMPLETING |
| DSBL_COMPLETE | Bool | IN заборона завершення (наприклад при необхідності очікування умови переходу з процедури верхнього рівня) |
Function
PROC_MACH
flowchart LR
PRCFG <--> state_machine
PRCHMI <--> state_machine
PRCCTRL <--> state_machine
PRCBUF <--> state_machine
subgraph PROC_MACH
state_machine[Логіка\n Автомату станів]
end
Функція PROC_MACH виконує наступні функції:
- забезпечує обробку автомату стану, а саме:
- обробку команд та перехід на відповідний стан (STEP1)
- формування
PRCCTRL.STA_ - скидання усіх команд (команди проходять тільки на один цикл)
- слідкує за оновленням T_STEP1 та збільшує значення T_STEP1
- обмежує STEP1, STEP2, T_STEP1 та T_STEP2 в межах діапазону
- блокує недозволені команди
- формує статусні біти для HMI, усі крім ENCMD_CANCEL, ENCMD_NEXT, ENCMD_OK
- керує перемиканням режимів
- керує станом тривог PRCCFG.TMAX (при активному) та PRCCFG.TMIN (при активному)
- добавляє до загального стану тривог стан мінімуму і максимуму виконання,
ALM = ALM OR PRCCFG.TMAX OR PRCCFG.TMIN - деактивування усіх кнопок керування в автоматичному режимі
- роботу з буфером
Загальний автомат станів наведений на рисунку
stateDiagram-v2
[*] --> Idle(1)
Idle(1) --> Starting(13) : CMD_START & ENBL
Starting(13) --> Running(2) : STARTING_CMPLT\n OR RUNING_CMPLT\n OR CMD_CMPLT
Starting(13) --> Holding(5): CMD_HOLD
Starting(13) --> Stopping(9): CMD_STOP
Starting(13) --> Aborting(11): CMD_ABORT
Running(2) --> Completing(14): RUNING_CMPLT\n OR CMD_CMPLT
Running(2) --> Pausing(3) : CMD_PAUSE
Running(2) --> Holding(5) : CMD_HOLD
Running(2) --> Stopping(9) : CMD_STOP
Running(2) --> Aborting(11) : CMD_ABORT
Completing(14) --> Complete(8) :COMPLETING_CMPLT\n OR CMD_CMPLT
Completing(14) --> Stopping(9) : CMD_STOP
Completing(14) --> Aborting(11) : CMD_ABORT
Completing(14) --> Starting(13) : CMD_START
Pausing(3) --> Paused(4) :PAUSING_CMPLT\n OR CMD_CMPLT
Pausing(3) --> Holding(5) : CMD_HOLD
Pausing(3) --> Stopping(9) : CMD_STOP
Pausing(3) --> Aborting(11) : CMD_ABORT
Paused(4) --> Running(2) : CMD_RESUME\n OR CMD_RESTART\n OR CMD_START
Paused(4) --> Completing(14) : RUNING_CMPLT
Paused(4) --> Holding(5) : CMD_HOLD
Paused(4) --> Stopping(9) : CMD_STOP
Paused(4) --> Aborting(11) : CMD_ABORT
Holding(5) --> Hold(6):HOLDING_CMPLT\n OR CMD_CMPLT
Holding(5) --> Stopping(9) : CMD_STOP
Holding(5) --> Aborting(11) : CMD_ABORT
Hold(6) --> Restarting(7) : CMD_RESTART
Hold(6) --> Stopping(9) : CMD_STOP
Hold(6) --> Aborting(11) : CMD_ABORT
Hold(6) --> Completing(14) :RUNING_CMPLT\n OR CMD_CMPLT
Restarting(7) --> Running(2):RESTARTING_CMPLT OR CMD_CMPLT
Restarting(7) --> Holding(5) : CMD_HOLD
Restarting(7) --> Stopping(9) : CMD_STOP
Restarting(7) --> Aborting(11) : CMD_ABORT
Complete(8) --> Idle(1) :CMD_RESET
Stopping(9) --> Aborting(11) : CMD_ABORT
Stopping(9) --> Stopped(10) : STOPPING_CMPLT\n OR CMD_CMPLT
Stopping(9) --> Starting(13) : CMD_START
Stopped(10) --> Idle(1) : CMD_RESET
Aborting(11) --> Aborted(12): ABORTING_CMPLT\n OR T_STEP2>3000 \n OR CMD_CMPLT
Aborted(12) --> Idle(1): CMD_RESET\n OR CMD_START
RUN
stateDiagram-v2
direction LR
[*] --> Idle(1)
Idle(1) --> Starting(13) : CMD_START & ENBL
Starting(13) --> Running(2) : STARTING_CMPLT\n OR RUNING_CMPLT\n OR CMD_CMPLT
Running(2) --> Completing(14): RUNING_CMPLT\n OR CMD_CMPLT
Completing(14) --> Complete(8) :COMPLETING_CMPLT\n OR CMD_CMPLT
Completing(14) --> Starting(13) : CMD_START
Complete(8) --> Idle(1) :CMD_RESET
PAUSE
stateDiagram-v2
direction lr
Running(2) --> Pausing(3) : CMD_PAUSE
Pausing(3) --> Paused(4) :PAUSING_CMPLT\n OR CMD_CMPLT
Pausing(3) --> Holding(5) : CMD_HOLD
Pausing(3) --> Stopping(9) : CMD_STOP
Pausing(3) --> Aborting(11) : CMD_ABORT
Paused(4) --> Running(2) : CMD_RESUME\n OR CMD_RESTART\n OR CMD_START
Paused(4) --> Completing(14) : RUNING_CMPLT
Paused(4) --> Holding(5) : CMD_HOLD
Paused(4) --> Stopping(9) : CMD_STOP
Paused(4) --> Aborting(11) : CMD_ABORT
HOLD
stateDiagram-v2
direction LR
Starting(13) --> Holding(5): CMD_HOLD
Running(2) --> Holding(5) : CMD_HOLD
Pausing(3) --> Holding(5) : CMD_HOLD
Paused(4) --> Holding(5) : CMD_HOLD
Holding(5) --> Hold(6):HOLDING_CMPLT\n OR CMD_CMPLT
Holding(5) --> Stopping(9) : CMD_STOP
Holding(5) --> Aborting(11) : CMD_ABORT
Hold(6) --> Restarting(7) : CMD_RESTART
Hold(6) --> Stopping(9) : CMD_STOP
Hold(6) --> Aborting(11) : CMD_ABORT
Hold(6) --> Completing(14) :RUNING_CMPLT\n OR CMD_CMPLT
Restarting(7) --> Running(2):RESTARTING_CMPLT OR CMD_CMPLT
Restarting(7) --> Holding(5) : CMD_HOLD
Restarting(7) --> Stopping(9) : CMD_STOP
Restarting(7) --> Aborting(11) : CMD_ABORT
STOP
stateDiagram-v2
Starting(13) --> Stopping(9): CMD_STOP
Running(2) --> Stopping(9) : CMD_STOP
Completing(14) --> Stopping(9) : CMD_STOP
Pausing(3) --> Stopping(9) : CMD_STOP
Paused(4) --> Stopping(9) : CMD_STOP
Holding(5) --> Stopping(9) : CMD_STOP
Hold(6) --> Stopping(9) : CMD_STOP
Restarting(7) --> Stopping(9) : CMD_STOP
Stopping(9) --> Stopped(10) : STOPPING_CMPLT\n OR CMD_CMPLT
Stopped(10) --> Idle(1) : CMD_RESET
ABORT
stateDiagram-v2
Starting(13) --> Aborting(11): CMD_ABORT
Running(2) --> Aborting(11) : CMD_ABORT
Completing(14) --> Aborting(11) : CMD_ABORT
Pausing(3) --> Aborting(11) : CMD_ABORT
Paused(4) --> Aborting(11) : CMD_ABORT
Holding(5) --> Aborting(11) : CMD_ABORT
Hold(6) --> Aborting(11) : CMD_ABORT
Restarting(7) --> Aborting(11) : CMD_ABORT
Stopping(9) --> Aborting(11) : CMD_ABORT
Aborting(11) --> Aborted(12): ABORTING_CMPLT\n OR T_STEP2>3000 \n OR CMD_CMPLT
Aborted(12) --> Idle(1): CMD_RESET\n OR CMD_START
PROC_TRANS_A
Дана функція реалізовує перехід при спрацюванні умови в автоматичному режимі або/та при команді CMD_NEXT в ручному/напівавтоматичному режимі:
- повертає логічну одиницю, якщо перехід спрацьовує, і переходить на крок, вказаний в полі
TOSTEP, якщоTOSTEP=1то це приймається як умова завершення стану - керує видимістю біту
ENCMD_NEXTв залежності від режимів - відключає включає видимість кнопок
CMD_OKтаCMD_CANCEL
flowchart LR
COND --умова переходу--> PROC_TRANS_A
PRCFG <-- крок, час кроку --> PROC_TRANS_A
PRCHMI <--режим, команди HMI--> PROC_TRANS_A
PRCCTRL <--команди CMPLT--> PROC_TRANS_A
TOSTEP --куди\n переходити --> PROC_TRANS_A
subgraph PROC_TRANS_A
cond_trans[Перевірка умови\n в залежності від режиму]
end
PROC_TRANS_M
Дана функція реалізовує перехід для ручних процедурних елементів що керуються командами:
ОК(CMD_OK) - підтвердити дію: для ручних операцій або команд підтвердження повідомлення (умова завершення кроку). Передбачається що видимість кнопки не залежить від режиму виконання процедурного елементу а використовується виключно для ручних процедур.ВІДМІНА(CMD_CANCEL) - негативне підтвердження (відміна) у випадку ручної операції. Передбачається що видимість кнопки не залежить від режиму виконання процедурного елементу а використовується виключно для ручних процедур.
Функція реалізовує:
- включає видимість
CMD_OK - керує видимістю
ENCMD_CANCELв залежності відTOSTEPCANCEL(ENCMD_CANCEL = TOSTEPCANCEL>0) - перехід на крок, вказаний в полі
TOSTEPOK, якщо відправлена командаCMD_OK(якщоTOSTEPOK=1то це приймається як умова завершення стану ) - перехід на крок, вказаний в полі
TOSTEPCANCEL, якщо відправлена командаCMD_CANCEL(якщоTOSTEPCANCEL=1то це приймається як умова завершення стану ) - відмикає видимість біту
ENCMD_NEXT
flowchart LR
PRCFG <-- крок, час кроку --> PROC_TRANS_M
PRCHMI <--режим, команди HMI--> PROC_TRANS_M
PRCCTRL <--команди CMPLT--> PROC_TRANS_M
TOSTEPOK --куди переходити \n при CMD_ОК --> PROC_TRANS_M
TOSTEPCANCEL --куди переходити \n при CMD_CANCEL --> PROC_TRANS_M
subgraph PROC_TRANS_M
cond_trans[Перевірка команди HMI]
end
Реалізація процедур
Нижче наведений приклад заготовки для реалізації процедури. Використовується наскрізна адресація кроків по всім станам, що може спростити відстеження в SCADA/HMI.
(* виставити умову дозволу*)
CTRL.ENBL := FALSE;
(*за необхідності фіксації переходів в БД на перехідних коках ставити затримки*)
(*за необхідності дій в простої, можна вписати в стан*)
IF CTRL.STA_IDLE THEN
CFG.STEP2 := 0;
END_IF;
IF CTRL.STA_STARTING THEN
CASE CFG.STEP2 OF
13000:
CFG.STEP2 := 13001;
CFG.T_STEP2 := 0;
13001:
CTRL.STARTING_CMPLT := TRUE; (*умова штатного завершення STARTING*)
CFG.T_STEP2 := 0;
ELSE (*перехід на RUNNING*)
CFG.STEP2 := 13000;
CFG.T_STEP2 := 0;
END_CASE;
(*умова нормального завершення етапу навіть в STARTING*)
IF CTRL.HL_RUNNING_CMPLT OR CTRL.RUNING_CMPLT THEN
CTRL.RUNING_CMPLT := TRUE;
CFG.STEP2 := 2000;
CFG.T_STEP2 := 0;
END_IF;
END_IF;
IF CTRL.STA_RUNNING THEN
CASE CFG.STEP2 OF
2000:
CFG.STEP2 := 2001;
CFG.T_STEP2 := 0;
2001: (* основні кроки програми *)
;
ELSE
CFG.STEP2 := 2000;
CFG.T_STEP2 := 0;
END_CASE;
(*умова нормального завершення етапу*)
IF CTRL.HL_RUNNING_CMPLT OR CTRL.RUNING_CMPLT THEN
CTRL.RUNING_CMPLT := TRUE;
CFG.STEP2 := 14000;
CFG.T_STEP2 := 0;
END_IF;
CTRL.RESTARTING_CMPLT := false;
END_IF;
IF CTRL.STA_COMPLETING THEN
CASE CFG.STEP2 OF
14000:
CFG.STEP2 := 14001;
CFG.T_STEP2 := 0; (* ініціалізація*)
14001:
CTRL.COMPLETING_CMPLT := TRUE;
CFG.T_STEP2 := 0;
ELSE
CFG.STEP2 := 14000;
CFG.T_STEP2 := 0;
END_CASE;
END_IF;
IF CTRL.STA_COMPLETE THEN
CASE CFG.STEP2 OF
8000:
CFG.STEP2 := 8001;
CFG.T_STEP2 := 0; (* ініціалізація*)
8001:
IF CFG.T_STEP2 > 5000 THEN
CTRL.CMD_RESET := TRUE;
END_IF;
ELSE
CFG.STEP2 := 8000;
CFG.T_STEP2 := 0;
END_CASE;
END_IF;
IF CTRL.STA_PAUSING THEN
CASE CFG.STEP2 OF
3000:
CFG.STEP2 := 3001;
CFG.T_STEP2 := 0; (* ініціалізація*)
3001:
CTRL.PAUSING_CMPLT := TRUE;
CFG.T_STEP2 := 0;
ELSE
CFG.STEP2 := 3000;
CFG.T_STEP2 := 0;
END_CASE;
END_IF;
IF CTRL.STA_PAUSED THEN
CASE CFG.STEP2 OF
4000:
CFG.STEP2 := 4001;
CFG.T_STEP2 := 0; (* ініціалізація*)
4001:
;
ELSE
CFG.STEP2 := 4000;
CFG.T_STEP2 := 0;
END_CASE;
END_IF;
IF CTRL.STA_RESTARTING THEN
CASE CFG.STEP2 OF
7000:
CFG.STEP2 := 7001;
CFG.T_STEP2 := 0; (* ініціалізація*)
7001:
CTRL.RESTARTING_CMPLT := TRUE;
CFG.T_STEP2 := 0;
ELSE
CFG.STEP2 := 7000;
CFG.T_STEP2 := 0;
END_CASE;
END_IF;
IF CTRL.STA_STOPPING THEN
CASE CFG.STEP2 OF
9000:
CFG.STEP2 := 9001;
CFG.T_STEP2 := 0; (* ініціалізація*)
9001:
CTRL.STOPPING_CMPLT := TRUE;
CFG.T_STEP2 := 0;
ELSE
CFG.STEP2 := 9000;
CFG.T_STEP2 := 0;
END_CASE;
END_IF;
IF CTRL.STA_STOPPED THEN
CASE CFG.STEP2 OF
10000:
CFG.STEP2 := 10001;
CFG.T_STEP2 := 0; (* ініціалізація*)
10001:
IF CFG.T_STEP2 > 5000 THEN
CTRL.CMD_RESET := TRUE;
END_IF;
ELSE
CFG.STEP2 := 10000;
CFG.T_STEP2 := 0;
END_CASE;
END_IF;
IF CTRL.STA_HOLDING THEN
CASE CFG.STEP2 OF
5000:
CFG.STEP2 := 5001;
CFG.T_STEP2 := 0; (* ініціалізація*)
5001:
CTRL.HOLDING_CMPLT := TRUE;
CFG.T_STEP2 := 0;
ELSE
CFG.STEP2 := 5000;
CFG.T_STEP2 := 0;
END_CASE;
END_IF;
IF CTRL.STA_HELD THEN
CASE CFG.STEP2 OF
6000:
CFG.STEP2 := 6001;
CFG.T_STEP2 := 0; (* ініціалізація*)
6001:
;
ELSE
CFG.STEP2 := 6000;
CFG.T_STEP2 := 0;
END_CASE;
END_IF;
IF CTRL.STA_ABORTING THEN
CASE CFG.STEP2 OF
11000:
CFG.STEP2 := 11001;
CFG.T_STEP2 := 0; (* ініціалізація*)
11001:
CTRL.ABORTING_CMPLT := TRUE;
CFG.T_STEP2 := 0;
ELSE
CFG.STEP2 := 11000;
CFG.T_STEP2 := 0;
END_CASE;
END_IF;
IF CTRL.STA_ABORTED THEN
CASE CFG.STEP2 OF
12000:
CFG.STEP2 := 12001;
CFG.T_STEP2 := 0; (* ініціалізація*)
12001:
IF CFG.T_STEP2 > 5000 THEN
CTRL.CMD_RESET := TRUE;
END_IF;
ELSE
CFG.STEP2 := 12000;
CFG.T_STEP2 := 0;
END_CASE;
END_IF;
PROC_MACH (ID := ID,
PRCCFG := CFG,
PRCHMI := HMI,
PRCCTRL := CTRL,
PRCBUF := PRCBUF,
PLCCFG := PLCCFG);
6#7fff_ffff THEN CFG.T_STEP2:=16#7fff_ffff;END_IF;
END_IF;
Виклик процедур йде бузумовно. Наприклад нижче наведений приклад виклику двох процедур для одного робочого вузла (Unit):
PH_EXMPL1 (ID := 1, (* унікальний ідентифікатор процедури*)
CFG := PHCFG_EXMPL1,
HMI := PHHMI_EXMPL1,
CTRL := PHCTRL_EXMPL1,
PRCBUF := PRCBUF, (*буферна змінна для налаштування з HMI*)
PLCCFG := PLC,
... //далі йдуть параметри специфічні для реалізацї
);