PACFramework
Equipment Procedures
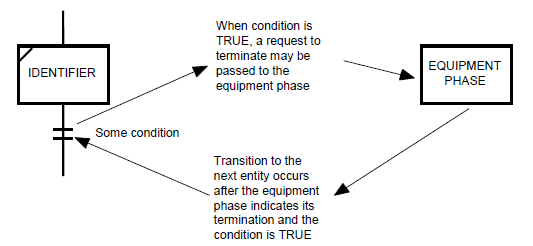
In procedural control according to ISA-88, a process program is a collection of procedures that, when coordinated, execute a certain sequence of technological actions. The top-level procedure (cell procedure) coordinates lower-level procedures (unit procedures), which in turn coordinate the execution of operations and/or phases.
In PLCs, equipment procedures are implemented in contrast to recipe procedures, which only reference equipment procedures or coordinate embedded procedures that themselves reference equipment procedures. In the framework, equipment procedures are implemented as functions. In the standard, procedures are also referred to as procedural elements, allowing them to be referenced as building blocks of higher-level procedures.
Functions for phases, unit procedures, operations, and cell procedures must be called in every cycle unconditionally and without nesting! If a procedure should perform no actions, an IDLE state is provided.
Organization of the state machine for a procedural element
According to ISA-88, the state machine for procedures can be defined arbitrarily. However, the 2010 edition of the standard proposed two example state machines. Figure 1 shows a combined state machine formed from these two, adding “Starting” and “Completing” states to the classic variant.
In Figure 1, groups of states run, active, and operate are introduced; these are not separate states but are used to simplify the diagram, showing commands that act identically on any state within the group.
stateDiagram-v2
[*] --> Idle
Idle --> Starting: Start
state operate {
state active {
state run{
Running --> Completing
Running --> Pausing: Pause
Pausing --> Paused
Paused --> Running: Resume
Starting --> Running
Restarting --> Running
}
Completing
Holding
Held
state cmdHold <<join>>
run --> cmdHold
cmdHold --> Holding : Hold
Held --> Restarting: Restart
Holding --> Held
}
state cmdStop <<join>>
active --> cmdStop
cmdStop --> Stopping: Stop
Stopping --> Stopped
}
Completing --> Complete
state cmdAbort <<join>>
operate --> cmdAbort
cmdAbort --> Aborting: Abort
Aborting --> Aborted
Stopped --> Idle: Reset
Complete --> Idle: Reset
Aborted --> Idle: Reset
Fig. 1. Proposed state machine for procedures in the framework.
Intermediate states are used for synchronizing SCADA/HMI with the PLC, and also between subsystems (e.g., functions synchronized across different PLCs). They also allow transition logging in journals and databases. Let us now examine this state machine in more detail.
When a procedural element is not executing, it is in the IDLE state. This is a passive state in which typically no control actions are performed. Upon system initialization, the procedural element enters this initial state. Normal execution involves the sequential transition through the following states:
stateDiagram-v2
direction LR
[*] --> IDLE
IDLE --> STARTING: START
STARTING --> RUNNING
RUNNING --> COMPLETING
COMPLETING --> COMPLETE
COMPLETE --> IDLE: RESET
The procedure is started by the START command, instructing the procedural element to begin executing the RUNNING logic. This command is valid only when the procedural element is in the IDLE state. However, before transitioning to the RUNNING state, the framework introduces an intermediate STARTING state, where preparatory actions can be performed. After completing these actions, the procedure transitions to COMPLETING (a state not originally defined in ISA-88). Upon completing the finalization logic, it transitions to COMPLETE. This state is necessary so that before the next execution, the procedural element receives a RESET command, confirming completion by the higher-level system.
Note that only two transitions are triggered by external commands to the procedural element; the rest occur based on internal logic of the procedural element or higher-level procedural elements (e.g., transition conditions in PFC). The sequence of states in normal transitions:
- IDLE: Passive state, waiting for START to transition to STARTING.
- STARTING: Executes startup/preparatory actions, then transitions to RUNNING upon completion.
- RUNNING: Executes the main process control logic, transitioning to COMPLETING upon an internal completion condition.
- COMPLETING: Executes completion logic, then transitions to COMPLETE upon an internal condition.
- COMPLETE: Awaits a RESET command to transition to IDLE.
For short-term issues requiring special handling (e.g., temporary material shortage), the procedural element may enter the PAUSED state. The standard and the framework provide an intermediate PAUSING state, entered upon the PAUSE command, followed by an internal transition to PAUSED. Exiting PAUSED to RUNNING occurs via the RESUME command.
stateDiagram-v2
direction LR
RUNNING --> PAUSING: PAUSE
PAUSING --> PAUSED
PAUSED --> RUNNING: RESUME
According to the standard:
- PAUSING: On receiving the PAUSE command, the procedural element halts at the next designated safe or stable point, then transitions to PAUSED.
- PAUSED: Used for short-term stops; RESUME transitions back to RUNNING, continuing immediately after the pause point.
Unlike pause, the HELD state is for long-term stops (e.g., storage of material before further processing). Transition to HOLDING occurs from any state in the run group upon the HOLD command, then proceeds to HELD. Exiting HELD occurs via RESTART through RESTARTING, which transitions back to RUNNING.
stateDiagram-v2
direction LR
state run {
Running
}
state cmdHold <<join>>
run --> cmdHold
cmdHold --> HOLDING: HOLD
HELD --> RESTARTING: RESTART
HOLDING --> HELD
RESTARTING --> Running
According to the standard:
- HOLDING: Executes logic to transition the element to a required state. If no actions are required, transitions immediately to HELD.
- HELD: Waits for further commands, typically used for long-term holds.
- RESTARTING: On RESTART, executes restart logic to return to RUNNING.
The STOP command’s use is ambiguous in the standard but in the PACFramework is intended for abnormal stops only. For normal stops, a higher-level command transitions from RUNNING to COMPLETING, considered an internal condition by the standard. A fragment is shown below:
stateDiagram-v2
direction LR
[*] --> IDLE
IDLE --> active
active: active\n(all states in the group)
state cmdStop <<join>>
active --> cmdStop
cmdStop --> STOPPING: STOP
STOPPING --> STOPPED
STOPPED --> IDLE: RESET
From any active state, the STOP command transitions to STOPPING, performing the abnormal stop logic, then to STOPPED, which awaits RESET to transition back to IDLE.
The standard defines:
- STOPPING: Executes controlled stop logic; if none is needed, transitions immediately to STOPPED.
- STOPPED: Awaits RESET to transition to IDLE.
For fast interruptions, the ABORT command forces a transition from any operate state without waiting for completion conditions, acting as an emergency exit (e.g., valve limit switch failure). The standard provides an ABORTING state for quick actions before transitioning to ABORTED, which, like COMPLETE and STOPPED, requires a RESET before restarting.
stateDiagram-v2
direction LR
[*] --> IDLE
IDLE --> operate
operate: operate\n(all states in the group and subgroups)
state cmdStop <<join>>
operate --> cmdStop
cmdStop --> ABORTING: ABORT
ABORTING --> ABORTED
ABORTED --> IDLE: RESET
According to the standard:
- ABORTING: Executes fast shutdown logic on ABORT; transitions immediately to ABORTED if none is required.
- ABORTED: Awaits RESET to transition back to IDLE.
According to the standard, command functions are:
- START: Starts normal execution (RUNNING) from IDLE.
- STOP: Initiates STOPPING from RUNNING, PAUSING, PAUSED, HOLDING, HELD, or RESTARTING.
- HOLD: Initiates HOLDING from RUNNING, PAUSING, PAUSED, or RESTARTING.
- RESTART: Initiates RESTARTING from HELD.
- ABORT: Initiates ABORTING from any state except IDLE, COMPLETE, ABORTING, and ABORTED.
- RESET: Transitions to IDLE from COMPLETE, ABORTED, or STOPPED.
- PAUSE: Initiates pause logic from RUNNING, awaiting RESUME.
- RESUME: Resumes execution from PAUSED.
Variables in the framework associated with a procedural element
Several variables of different types are associated with a procedural element:
- The structure
PROC_CFGis used to store typical configurable procedure data, control, and management from the PLC program. It may also be used for buffered exchange with SCADA/HMI. - The structure
PROC_HMIis used for monitoring/controlling the procedure state from the HMI. - The structure
PROC_CTRLis used for controlling and managing the procedure within the PLC program from the same or higher-level procedures. - A parameter variable that configures and controls process parameters for a specific procedural element, linked to the recipe.
- Input/output variables that serve as inputs and outputs for the procedure (typically various CM signals).
These variables are described in more detail below.
State representation in the framework (STEP1)
All states described above are represented in the framework by several variables:
PROC_CFG.STEP1– a step-based state representation, the main storage location. It is controlled by the state machine in thePROC_MACHengine (described below).- Fields in
PROC_CTRLwith theSTAprefix – mirrorPROC_CFG.STEP1for convenient use. They are modified in thePROC_MACHengine and are read-only elsewhere. PROC_HMI.STEP1– a copy ofPROC_CFG.STEP1, available as read-only in the HMI.
The table below lists these states and additional state aggregations for convenience in algorithm implementation.
Field name in PROC_CTRL |
STEP1 value | State name | Note |
|---|---|---|---|
| 0 | initialization (not a state) | in other cases, an invalid value | |
| STA_RUNNING | 2 | RUNNING | |
| STA_IDLE | 1 | IDLE | |
| STA_RESUMING | 15 | RESUMING | For optional PAUSED -> RUNNING transitional state. Absent in the standard solution |
| STA_PAUSING | 3 | PAUSING | |
| STA_PAUSED | 4 | PAUSED | |
| STA_HOLDING | 5 | HOLDING | |
| STA_HELD | 6 | HOLD | |
| STA_RESTARTING | 7 | RESTARTING | |
| STA_COMPLETE | 8 | COMPLETE | |
| STA_STOPPING | 9 | STOPPING | |
| STA_STOPPED | 10 | STOPPED | |
| STA_ABORTING | 11 | ABORTING | |
| STA_ABORTED | 12 | ABORTED | |
| STA_STARTING | 13 | STARTING | |
| STA_COMPLETING | 14 | COMPLETING | |
| STA_NOTWRK | - | any end states = STA_COMPLETE OR STA_STOPPED OR STA_ABORTED OR STA_IDLE | |
| STA_WRK | - | any working states = STA_RUNNING OR STA_STARTING OR STA_COMPLETING |
Conditions for state transitions in the framework
Transition conditions are triggered by one or a combination of the following event types:
- A command sent from a higher-level procedural element during state changes: when the procedural element is part of another procedure and its execution involves controlling this element’s state.
- A command sent from the HMI.
- Internal logic within the procedural element.
Higher-level control commands and the triggering of transition conditions by internal logic are implemented via the PROC_CTRL structure variable. Commands from the HMI are transmitted via a field in the PROC_HMI type (i.e., PROC_HMI.CMD).
The following commands defined in the standard and described earlier are implemented in the framework as boolean fields in the structure variable with the CMD_ prefix and can be sent from higher-level procedural elements. They have equivalent command codes in PROC_HMI.CMD. A typical framework approach for minimizing these commands (grouping) will be described later.
Command/field name in PROC_CTRL |
Value in PROC_HMI.CMD |
Purpose |
|---|---|---|
| CMD_START | 1 | START |
| CMD_RESUME | 2 | RESUME |
| CMD_RESTART | 5 | RESTART |
| CMD_PAUSE | 3 | PAUSE |
| CMD_HOLD | 6 | HOLD |
| CMD_STOP | 7 | STOP |
| CMD_ABORT | 8 | ABORT |
| CMD_RESET | 4 | RESET |
Other transition conditions are represented by boolean fields in the PROC_CTRL type variable with the _CMPLT suffix. All boolean fields except HL_RUNNING_CMPLT are triggered by the internal execution logic of the procedural element, meaning they are modified inside the procedural element.
Field name in PROC_CTRL |
Purpose | Transition |
|---|---|---|
| STARTING_CMPLT | condition for transitioning to RUNNING is met | STARTING -> RUNNING |
| HL_RUNNING_CMPLT | external (high-level) completion condition triggered, must handle RUNING_CMPLT. HL (HighLevel) is needed for proper completion of a lower-level procedural element when a transition condition is triggered in the higher-level procedure. | RUNNING -> COMPLETING |
| RUNING_CMPLT | procedure completed (internal completion condition triggered) | RUNNING -> COMPLETING |
| COMPLETING_CMPLT | condition for transitioning to COMPLETE is met | COMPLETING -> COMPLETE |
| PAUSING_CMPLT | condition for transitioning to PAUSED is met | PAUSING -> PAUSED |
| RESTARTING_CMPLT | condition for transitioning to RUNNING from HOLD is met | RESTARTING -> RUNNING |
| RESUMING_CMPLT | condition for transitioning to RUNNING from RESUMING is met; needed only if RESUMING state is used. Not used in the standard framework version. | RESUMING -> RUNNING |
| HOLDING_CMPLT | condition for transitioning to HOLD from RUNNING is met | HOLDING -> RUNNING |
| STOPPING_CMPLT | condition for transitioning to STOPPED is met | STOPPING -> STOPPED |
| ABORTING_CMPLT | condition for transitioning to ABORTED is met | ABORTING -> ABORTED |
The RUNING_CMPLT bit is used to form the internal procedure completion condition. When creating a recipe procedure in PFC, this forms an implicit transition. For the state machine engine function PROC_MACH, this acts as an external signal since it is set in the procedural element’s main logic.
The HL_RUNNING_CMPLT bit is used to form the external procedure completion condition. It is an external command from higher-level control, such as a recipe procedure, and can define an explicit transition. In PROC_MACH logic, this bit is not used directly but is processed within the procedure logic, which then sets RUNING_CMPLT. An example will be provided in the next subsection.
PROC_CTRL.ENBL and PROC_CTRL.DSBL_COMPLETE
The PROC_CTRL.ENBL bit allows blocking the procedure start (from IDLE to Starting) under certain conditions. This bit can be set either by the procedure’s own logic or by higher-level control logic, including via basic functions. The procedure’s state machine engine will not react to the CMD_START command if PROC_CTRL.ENBL=FALSE, and all HMI commands will also be ignored.
The PROC_CTRL.DSBL_COMPLETE bit can be used to hold the procedure in the RUNNING state even if the RUNING_CMPLT bit is set to 1. This is necessary if the transition should occur only when RUNING_CMPLT=TRUE AND PROC_CTRL.DSBL_COMPLETE=FALSE. This bit is not standard in the framework and is added when needed.
The STA_NOTWRK and STA_WRK bits simplify procedure monitoring and are used in logic.
| PROC_CTRL attribute | STA bit | Description | Note |
|---|---|---|---|
| ENBL | 14 | permission to activate the procedure | read-only in HMI |
| DSBL_COMPLETE | - | disable completion (e.g., when waiting for a condition from a higher-level procedure) | not standard in the framework |
Steps (STEP) and step times (T_STEP)
The structured variables PROC_CFG and PROC_HMI contain fields for steps and step times.
STEP1, described above, indicates the procedural element’s state. STEP2, by contrast, is the procedural element’s step number. For easier debugging, steps are numbered consecutively across all states, allowing the state to be identified by the step number.
T_STEP1 indicates the time spent in the RUNNING state in ms. In all other intermediate and final states, time is not counted. It resets to 0 upon transition to IDLE and HOLDING.
T_STEP2 indicates the step execution time in ms across all states except IDLE, where it is 0.
| Field | Type | Purpose | Note |
|---|---|---|---|
| STEP1 | INT | main state value | |
| STEP2 | INT | step within the state | step numbering across states with a granularity of 1000 (15 states = 1000–15000) |
| T_STEP1 | UDINT | procedure execution time in ms | counted only in RUNNING, typically frozen in PAUSED, reset in HOLDING |
| T_STEP2 | UDINT | step execution time in ms | equals 0 in IDLE |
If multiple parallel steps need to be executed, it is recommended to create separate procedural elements to run in parallel, as the framework does not provide other options.
Control and monitoring from HMI and modes
Appearance
All states, modes, and alarms are visible in the respective control window, where control commands are also available.
States are highlighted with color (or white shades) and corresponding state text, along with state time.
For steps, the step number, text, and step time are displayed. Each step number is expected to have its own text message displayed on the screen. For automated deployment utilities, it is recommended that these messages be recorded as comments next to the step numbers in the CASE structure.
Control buttons execute commands and are shown or hidden depending on modes and states.
HMI commands
Control provides the following buttons:
START– executes several commands depending on the state (command aggregation):- CMD_START
- CMD_RESTART
- CMD_RESET
- CMD_RESUME
STOP– executes CMD_STOPPAUSE(if required) – executes CMD_PAUSEHOLD(if required) – executes CMD_HOLDABORT(if required, with access restrictions) – executes CMD_ABORT
All these commands must require confirmation to prevent accidental actions.
The following commands are optional, allowing manual control of procedure execution. Their implementation depends on the project and is therefore not part of the core framework, but they are listed, with some functionality implemented (notably in PROC_TRANS_A and PROC_TRANS_M functions):
Next step(CMD_NEXT) – transitions to the next step without waiting for completion conditions. It may depend on the selected procedural element control mode.OK(CMD_OK) – confirms an action, for manual operations or confirmation of messages (step completion condition). It is intended that this button’s visibility is mode-independent and used only for manual procedures.CANCEL(CMD_CANCEL) – negative confirmation (cancellation) during manual operations. It is intended that this button’s visibility is mode-independent and used only for manual procedures.
All commands undergo a preliminary check before execution. Status bits indicating permission for execution are sent to the HMI, allowing the corresponding buttons to be deactivated if the command is not permitted.
Modes
The framework provides procedural element control modes according to ISA-88:
- manual (MAN)
- automatic (AUTO)
- semi-automatic (SEMI)
In automatic mode, state control from the HMI is disabled, and all state control buttons are deactivated. If the procedural element is controlled by a higher-level element, it may first switch the element to automatic mode before starting it, ensuring that it is fully controlled by the higher-level element by default.
Other mode implementation requirements are outside the current scope of PACFramework as they may be managed by external engines (procedure implementation) and can affect step transitions. This should be specified in technical requirements. For example, transitions between steps within a procedural element may operate depending on mode as follows:
- in automatic mode – only when the condition is met,
in manual mode – only upon sending
CMD_NEXT, in semi-automatic mode – automatically or uponCMD_NEXT; between states upon condition ANDCMD_NEXT - in automatic mode – only when the condition is met,
in manual mode – when the condition is met OR upon
CMD_NEXT, in semi-automatic mode – upon condition ANDCMD_NEXT
Mode transitions of a procedural element should be logged in the event journal.
Alarms
The framework provides the following standard alarms:
- TMAXERR – maximum procedure execution time error, when T_STEP1 exceeds the maximum
PRC_CFG.TMAX - TMINERR – minimum execution time error, when T_STEP1 is less than the minimum
PRC_CFG.TMIN - STA_ALM – general alarm related to the procedural element, for time errors or other alarms (defined by the algorithm)
A specific technological alarm defined within a technological procedural element can be identified by the step number (as an implementation option), where a specific step is allocated for a particular alarm.
State and mode bits STA
The main state of a procedural element is indicated by STEP1. However, other functional elements associated with the procedure are combined in STA, i.e., PROC_CFG.STA and PROC_HMI.STA.
| Bit name | STA bit number | Purpose | Note |
|---|---|---|---|
| ENCMD_START | 0 | =1, permission for HMI START command | managed by PROC_MACH engine |
| ENCMD_PAUSE | 1 | permission for HMI PAUSE command | managed by PROC_MACH engine |
| ENCMD_RESET | 2 | permission for HMI RESET command | managed by PROC_MACH engine |
| ENCMD_HOLD | 3 | permission for HMI HOLD command | managed by PROC_MACH engine |
| ENCMD_STOP | 4 | permission for HMI STOP command | managed by PROC_MACH engine |
| ENCMD_CANCEL | 5 | permission for HMI negative confirmation (cancellation) | managed by the main algorithm |
| ENCMD_NEXT | 6 | permission for HMI to proceed to the next step | managed by the main algorithm |
| ENCMD_OK | 7 | permission for HMI to confirm action | managed by the main algorithm |
| TMAXERR | 8 | maximum execution time error, time exceeds maximum | |
| TMINERR | 9 | minimum execution time error, time below minimum | |
| STA_ALM | 10 | procedure error present | |
| SEMI | 11 | =1 semi-automatic mode | AUTO = NOT MAN AND NOT SEMI |
| INBUF | 12 | buffer occupied | |
| MAN | 13 | =1, manual mode | AUTO = NOT MAN AND NOT SEMI |
| ENBL | 14 | permission to start | |
| CMD_BUF | 15 | load into buffer | only PROC_HMI.STA |
Organization of the procedural element function
A procedural element is implemented as a function that must be called unconditionally in the controller task. The function arguments are:
- ID – a unique identifier of the procedure (passed as input for readability and reliability)
- variables of type
PROC_CFG - variables of type
PROC_HMI - variables of type
PROC_CTRL - the parameter variable
PARA - input/output variables
IO
The variables are described above.
To simplify the handling of typical commands and the state machine, the framework provides the PROC_MACH function, which performs standard operations.
flowchart LR
ID --> PROCEDURE
PRCFG <--> PROCEDURE
PRCHMI <--> PROCEDURE
PRCCTRL <--> PROCEDURE
PRCBUF <--> PROCEDURE
PARA <--> PROCEDURE
IO <--> PROCEDURE
subgraph PROCEDURE
direction TB
proc_logic[Procedure\nLogic]
subgraph PROC_MACH
state_machine[State Machine\nLogic]
end
proc_logic --- PROC_MACH
end
Thus, the program of any procedure includes the following parts:
- processing of procedure-specific logic
- processing of the state machine –
PROC_MACH
Variables
PROC_CFG
The main structure (type) used for storing configurable procedure data, control, and management from the PLC program. It can also be used for buffered exchange with SCADA/HMI.
Attributes
| Attribute | Type | Description | Note |
|---|---|---|---|
| ID | UINT | identifier | |
| CLSID | UINT | CLSID | |
| STA | UINT/INT | as described above | |
| CMD | UINT/INT | Commands (numeric values below): | |
| 1 – START (start procedure) | |||
| 2 – RESUME (resume, continue) | |||
| 3 – PAUSE (pause) | |||
| 4 – RESET (reset) | |||
| 5 – RESTART (restart) | |||
| 6 – HOLD (hold) | |||
| 7 – STOP (stop procedure execution) | |||
| 8 – ABORT (abort) | |||
| 9 – CMPLT (complete transition state – for debugging) | |||
| 16#A..F – reserved | |||
| 16#0100 – read configuration from buffer (256) | |||
| 16#0101 – write configuration to buffer (257) | |||
| 16#102 – switch to automatic mode | |||
| 16#103 – switch to manual mode | |||
| 16#104 – toggle manual mode | |||
| 16#105 – switch to semi-automatic (program) mode | |||
| 16#0200 – CMD_NEXT (HMI – move to next T_STEP2 step, skip condition); implemented in the procedure’s main program | |||
| 16#0300 – CMD_OK confirmation command; implemented in the procedure’s main program | |||
| 16#0301 – CANCEL (HMI – negative confirmation (cancel) for manual operation); implemented in the procedure’s main program | |||
| 2000…3000 (16#7D0 - 16#BB8) – move to the corresponding step; implemented in the procedure’s main program | |||
| PRM | INT | bit parameters (bit set described below) | |
| X7 AMAXENBL – activate max execution time alarm | |||
| X8 AMINENBL – activate min execution time alarm | |||
| X9 HMIMIN – =1 display time on HMI in hours/minutes | |||
| rez1 | INT | for alignment | |
| STEP1 | INT | state step | |
| 0 – initialization (PLC start only) | pink | ||
| 1 – Idle | transparent | ||
| 13 – Starting | light gray, circle with triangle | ||
| 2 – Running | white, circle with triangle | ||
| 14 – Completing | light gray, circle with checkmark | ||
| 3 – Pausing | light yellow, circle with pause bars | ||
| 4 – Paused | yellow, circle with pause bars | ||
| 5 – Holding | light brown, circle with diamond | ||
| 6 – Hold | brown, circle with diamond | ||
| 7 – Restarting | beige, circle with triangle | ||
| 8 – Complete | gray, circle with checkmark | ||
| 9 – Stopping | light red, square within square (stop) | ||
| 10 – Stopped | dark red, square within square (stop) | ||
| 11 – Aborting | pink, diamond | ||
| 12 – Aborted | purple, diamond with square | ||
| STEP2 | INT | step within state; step granularity across states is 1000 (15 states = 1000–15000) | |
| 0 – initialization (PLC start only) | |||
| 1000 – Idle | |||
| 13000 – Starting | |||
| 2000 – Running | |||
| 14000 – Completing | |||
| 3000 – Pausing | |||
| 4000 – Paused | |||
| 5000 – Holding | |||
| 6000 – Hold | |||
| 7000 – Restarting | |||
| 8000 – Complete | |||
| 9000 – Stopping | |||
| 10000 – Stopped | |||
| 11000 – Aborting | |||
| 12000 – Aborted | |||
| - steps within states should use a granularity of 10 for inserting additional steps - each state should have a first initialization step where actions are executed once per cycle | |||
| T_STEP1 | UDINT | procedure execution time (in Running) in ms | |
| T_STEP2 | UDINT | procedure step execution time in ms | |
| TMIN | UDINT | minimum execution time limit, s | |
| TMAX | UDINT | maximum execution time limit, s |
PROC_HMI
The PROC_HMI structure is used for monitoring and controlling the procedure state from the HMI.
| Attribute | Type | Description |
|---|---|---|
| STA | UINT/INT | mirrors PROC_CFG.STA |
| CMD | UINT/INT | mirrors PROC_CFG.CMD |
| STEP1 | INT | mirrors PROC_CFG.STEP1 |
| STEP2 | INT | mirrors PROC_CFG.STEP2 (optional for detailed logging) |
| T_STEP1 | UDINT | mirrors PROC_CFG.T_STEP1 |
| T_STEP2 | UDINT | mirrors PROC_CFG.T_STEP2 |
PROC_CTRL
The PROC_CTRL structure is used for controlling and managing the procedure within the PLC program from the same or higher-level procedures.
| Attribute | Type | Description |
|---|---|---|
| ENBL | Bool | IN permission to activate the procedure |
| PAUSING_CMPLT | Bool | IN condition to transition to PAUSED is met |
| RUNING_CMPLT | Bool | IN procedure has completed (internal completion condition triggered). As the standard state machine does not define this command, it is included in the framework for standard condition handling. Conditions are generated outside PROC_MACH. |
| HL_RUNNING_CMPLT | Bool | IN external completion condition triggered, should handle RUNING_CMPLT. HL (HighLevel) is needed for correct lower-level procedure completion upon triggering the transition condition. |
| RESTARTING_CMPLT | Bool | IN condition to transition from HOLD to RUNNING is met |
| RESUMING_CMPLT | Bool | IN condition to transition from RESUMING to RUNNING is met |
| HOLDING_CMPLT | Bool | IN condition to transition from RUNNING to HOLD is met |
| STOPPING_CMPLT | Bool | IN condition to transition to STOPPED is met |
| ABORTING_CMPLT | Bool | IN condition to transition to ABORTED is met |
| STARTING_CMPLT | Bool | IN condition to transition to RUNNING is met |
| COMPLETING_CMPLT | Bool | IN condition to transition to COMPLETE is met |
| CMD_START | Bool | IN program command START |
| CMD_RESUME | Bool | IN program command RESUME |
| CMD_RESTART | Bool | IN program command RESTART |
| CMD_PAUSE | Bool | IN program command PAUSE |
| CMD_HOLD | Bool | IN program command HOLD |
| CMD_STOP | Bool | IN program command STOP |
| CMD_ABORT | Bool | IN program command ABORT |
| CMD_RESET | Bool | IN program command RESET |
| STA_RUNNING | Bool | OUT state RUNNING |
| STA_IDLE | Bool | OUT state IDLE |
| STA_RESUMING | Bool | OUT state RESUMING |
| STA_PAUSING | Bool | OUT state PAUSING |
| STA_PAUSED | Bool | OUT state PAUSED |
| STA_HOLDING | Bool | OUT state HOLDING |
| STA_HOLD | Bool | OUT state HOLD |
| STA_RESTARTING | Bool | OUT state RESTARTING |
| STA_COMPLETE | Bool | OUT state COMPLETE |
| STA_STOPPING | Bool | OUT state STOPPING |
| STA_STOPPED | Bool | OUT state STOPPED |
| STA_ABORTING | Bool | OUT state ABORTING |
| STA_ABORTED | Bool | OUT state ABORTED |
| STA_STARTING | Bool | OUT state STARTING |
| STA_COMPLETING | Bool | OUT state COMPLETING |
| STA_NOTWRK | Bool | OUT any end state = STA_COMPLETE OR STA_STOPPED OR STA_ABORTED OR STA_IDLE |
| STA_WRK | Bool | OUT any working state = STA_RUNNING OR STA_STARTING OR STA_COMPLETING |
| DSBL_COMPLETE | Bool | IN disable completion (e.g., when waiting for a condition from a higher-level procedure) |
Function
PROC_MACH
flowchart LR
PRCFG <--> state_machine
PRCHMI <--> state_machine
PRCCTRL <--> state_machine
PRCBUF <--> state_machine
subgraph PROC_MACH
state_machine[State Machine\nLogic]
end
The PROC_MACH function performs the following tasks:
- processes the state machine, including:
- handling commands and transitioning to the appropriate state (STEP1)
- setting
PRCCTRL.STA_ - clearing all commands (commands are active for only one cycle)
- monitors and increments
T_STEP1 - limits
STEP1,STEP2,T_STEP1, andT_STEP2within the allowed range - blocks unauthorized commands
- generates status bits for the HMI, all except ENCMD_CANCEL, ENCMD_NEXT, ENCMD_OK
- manages mode switching
- monitors alarm states for
PRCCFG.TMAX(if active) andPRCCFG.TMIN(if active) - adds the minimum and maximum execution time alarms to the general alarm state,
ALM = ALM OR PRCCFG.TMAX OR PRCCFG.TMIN - deactivates all control buttons in automatic mode
- manages buffer operations
The general state machine is shown in the diagram.
stateDiagram-v2
[*] --> Idle(1)
Idle(1) --> Starting(13) : CMD_START & ENBL
Starting(13) --> Running(2) : STARTING_CMPLT\n OR RUNING_CMPLT\n OR CMD_CMPLT
Starting(13) --> Holding(5): CMD_HOLD
Starting(13) --> Stopping(9): CMD_STOP
Starting(13) --> Aborting(11): CMD_ABORT
Running(2) --> Completing(14): RUNING_CMPLT\n OR CMD_CMPLT
Running(2) --> Pausing(3) : CMD_PAUSE
Running(2) --> Holding(5) : CMD_HOLD
Running(2) --> Stopping(9) : CMD_STOP
Running(2) --> Aborting(11) : CMD_ABORT
Completing(14) --> Complete(8) :COMPLETING_CMPLT\n OR CMD_CMPLT
Completing(14) --> Stopping(9) : CMD_STOP
Completing(14) --> Aborting(11) : CMD_ABORT
Completing(14) --> Starting(13) : CMD_START
Pausing(3) --> Paused(4) :PAUSING_CMPLT\n OR CMD_CMPLT
Pausing(3) --> Holding(5) : CMD_HOLD
Pausing(3) --> Stopping(9) : CMD_STOP
Pausing(3) --> Aborting(11) : CMD_ABORT
Paused(4) --> Running(2) : CMD_RESUME\n OR CMD_RESTART\n OR CMD_START
Paused(4) --> Completing(14) : RUNING_CMPLT
Paused(4) --> Holding(5) : CMD_HOLD
Paused(4) --> Stopping(9) : CMD_STOP
Paused(4) --> Aborting(11) : CMD_ABORT
Holding(5) --> Hold(6):HOLDING_CMPLT\n OR CMD_CMPLT
Holding(5) --> Stopping(9) : CMD_STOP
Holding(5) --> Aborting(11) : CMD_ABORT
Hold(6) --> Restarting(7) : CMD_RESTART
Hold(6) --> Stopping(9) : CMD_STOP
Hold(6) --> Aborting(11) : CMD_ABORT
Hold(6) --> Completing(14) :RUNING_CMPLT\n OR CMD_CMPLT
Restarting(7) --> Running(2):RESTARTING_CMPLT OR CMD_CMPLT
Restarting(7) --> Holding(5) : CMD_HOLD
Restarting(7) --> Stopping(9) : CMD_STOP
Restarting(7) --> Aborting(11) : CMD_ABORT
Complete(8) --> Idle(1) :CMD_RESET
Stopping(9) --> Aborting(11) : CMD_ABORT
Stopping(9) --> Stopped(10) : STOPPING_CMPLT\n OR CMD_CMPLT
Stopping(9) --> Starting(13) : CMD_START
Stopped(10) --> Idle(1) : CMD_RESET
Aborting(11) --> Aborted(12): ABORTING_CMPLT\n OR T_STEP2>3000 \n OR CMD_CMPLT
Aborted(12) --> Idle(1): CMD_RESET\n OR CMD_START
RUN
stateDiagram-v2
direction LR
[*] --> Idle(1)
Idle(1) --> Starting(13) : CMD_START & ENBL
Starting(13) --> Running(2) : STARTING_CMPLT\n OR RUNING_CMPLT\n OR CMD_CMPLT
Running(2) --> Completing(14): RUNING_CMPLT\n OR CMD_CMPLT
Completing(14) --> Complete(8) :COMPLETING_CMPLT\n OR CMD_CMPLT
Completing(14) --> Starting(13) : CMD_START
Complete(8) --> Idle(1) :CMD_RESET
PAUSE
stateDiagram-v2
direction lr
Running(2) --> Pausing(3) : CMD_PAUSE
Pausing(3) --> Paused(4) :PAUSING_CMPLT\n OR CMD_CMPLT
Pausing(3) --> Holding(5) : CMD_HOLD
Pausing(3) --> Stopping(9) : CMD_STOP
Pausing(3) --> Aborting(11) : CMD_ABORT
Paused(4) --> Running(2) : CMD_RESUME\n OR CMD_RESTART\n OR CMD_START
Paused(4) --> Completing(14) : RUNING_CMPLT
Paused(4) --> Holding(5) : CMD_HOLD
Paused(4) --> Stopping(9) : CMD_STOP
Paused(4) --> Aborting(11) : CMD_ABORT
HOLD
stateDiagram-v2
direction LR
Starting(13) --> Holding(5): CMD_HOLD
Running(2) --> Holding(5) : CMD_HOLD
Pausing(3) --> Holding(5) : CMD_HOLD
Paused(4) --> Holding(5) : CMD_HOLD
Holding(5) --> Hold(6):HOLDING_CMPLT\n OR CMD_CMPLT
Holding(5) --> Stopping(9) : CMD_STOP
Holding(5) --> Aborting(11) : CMD_ABORT
Hold(6) --> Restarting(7) : CMD_RESTART
Hold(6) --> Stopping(9) : CMD_STOP
Hold(6) --> Aborting(11) : CMD_ABORT
Hold(6) --> Completing(14) :RUNING_CMPLT\n OR CMD_CMPLT
Restarting(7) --> Running(2):RESTARTING_CMPLT OR CMD_CMPLT
Restarting(7) --> Holding(5) : CMD_HOLD
Restarting(7) --> Stopping(9) : CMD_STOP
Restarting(7) --> Aborting(11) : CMD_ABORT
STOP
stateDiagram-v2
Starting(13) --> Stopping(9): CMD_STOP
Running(2) --> Stopping(9) : CMD_STOP
Completing(14) --> Stopping(9) : CMD_STOP
Pausing(3) --> Stopping(9) : CMD_STOP
Paused(4) --> Stopping(9) : CMD_STOP
Holding(5) --> Stopping(9) : CMD_STOP
Hold(6) --> Stopping(9) : CMD_STOP
Restarting(7) --> Stopping(9) : CMD_STOP
Stopping(9) --> Stopped(10) : STOPPING_CMPLT\n OR CMD_CMPLT
Stopped(10) --> Idle(1) : CMD_RESET
ABORT
stateDiagram-v2
Starting(13) --> Aborting(11): CMD_ABORT
Running(2) --> Aborting(11) : CMD_ABORT
Completing(14) --> Aborting(11) : CMD_ABORT
Pausing(3) --> Aborting(11) : CMD_ABORT
Paused(4) --> Aborting(11) : CMD_ABORT
Holding(5) --> Aborting(11) : CMD_ABORT
Hold(6) --> Aborting(11) : CMD_ABORT
Restarting(7) --> Aborting(11) : CMD_ABORT
Stopping(9) --> Aborting(11) : CMD_ABORT
Aborting(11) --> Aborted(12): ABORTING_CMPLT\n OR T_STEP2>3000 \n OR CMD_CMPLT
Aborted(12) --> Idle(1): CMD_RESET\n OR CMD_START
PROC_TRANS_A
This function performs a transition when a condition is met in automatic mode and/or upon the CMD_NEXT command in manual/semi-automatic mode:
- returns a logical high if the transition is triggered and moves to the step specified in the
TOSTEPfield; ifTOSTEP=1, it is treated as the condition for state completion - controls the visibility of the
ENCMD_NEXTbit depending on the mode - enables or disables the visibility of the
CMD_OKandCMD_CANCELbuttons
flowchart LR
COND --умова переходу--> PROC_TRANS_A
PRCFG <-- крок, час кроку --> PROC_TRANS_A
PRCHMI <--режим, команди HMI--> PROC_TRANS_A
PRCCTRL <--команди CMPLT--> PROC_TRANS_A
TOSTEP --куди\n переходити --> PROC_TRANS_A
subgraph PROC_TRANS_A
cond_trans[Перевірка умови\n в залежності від режиму]
end
PROC_TRANS_M
This function performs transitions for manual procedural elements controlled by commands:
OK(CMD_OK) – confirms an action: for manual operations or message confirmation commands (step completion condition). The button’s visibility is intended to be independent of the procedural element’s execution mode and used exclusively for manual procedures.CANCEL(CMD_CANCEL) – negative confirmation (cancellation) during manual operations. The button’s visibility is intended to be independent of the procedural element’s execution mode and used exclusively for manual procedures.
The function performs the following:
- enables the visibility of
CMD_OK - controls the visibility of
ENCMD_CANCELdepending onTOSTEPCANCEL(ENCMD_CANCEL = TOSTEPCANCEL > 0) - transitions to the step specified in
TOSTEPOKwhen theCMD_OKcommand is sent (ifTOSTEPOK=1, it is treated as a condition for state completion) - transitions to the step specified in
TOSTEPCANCELwhen theCMD_CANCELcommand is sent (ifTOSTEPCANCEL=1, it is treated as a condition for state completion) - disables the visibility of the
ENCMD_NEXTbit
flowchart LR
PRCFG <-- крок, час кроку --> PROC_TRANS_M
PRCHMI <--режим, команди HMI--> PROC_TRANS_M
PRCCTRL <--команди CMPLT--> PROC_TRANS_M
TOSTEPOK --куди переходити \n при CMD_ОК --> PROC_TRANS_M
TOSTEPCANCEL --куди переходити \n при CMD_CANCEL --> PROC_TRANS_M
subgraph PROC_TRANS_M
cond_trans[Перевірка команди HMI]
end
Procedure Implementation
Below is a template example for implementing a procedure. Cross-state step addressing is used across all states, which can simplify monitoring in SCADA/HMI.
(* set the enable condition *)
CTRL.ENBL := FALSE;
(* if logging transitions to the DB is needed, add delays at transition steps *)
(* if idle state actions are needed, they can be added inside the state *)
IF CTRL.STA_IDLE THEN
CFG.STEP2 := 0;
END_IF;
IF CTRL.STA_STARTING THEN
CASE CFG.STEP2 OF
13000:
CFG.STEP2 := 13001;
CFG.T_STEP2 := 0;
13001:
CTRL.STARTING_CMPLT := TRUE; (* normal completion condition for STARTING *)
CFG.T_STEP2 := 0;
ELSE (* transition to RUNNING *)
CFG.STEP2 := 13000;
CFG.T_STEP2 := 0;
END_CASE;
(* allow normal phase completion even in STARTING *)
IF CTRL.HL_RUNNING_CMPLT OR CTRL.RUNING_CMPLT THEN
CTRL.RUNING_CMPLT := TRUE;
CFG.STEP2 := 2000;
CFG.T_STEP2 := 0;
END_IF;
END_IF;
IF CTRL.STA_RUNNING THEN
CASE CFG.STEP2 OF
2000:
CFG.STEP2 := 2001;
CFG.T_STEP2 := 0;
2001: (* main program steps *)
;
ELSE
CFG.STEP2 := 2000;
CFG.T_STEP2 := 0;
END_CASE;
(* normal phase completion condition *)
IF CTRL.HL_RUNNING_CMPLT OR CTRL.RUNING_CMPLT THEN
CTRL.RUNING_CMPLT := TRUE;
CFG.STEP2 := 14000;
CFG.T_STEP2 := 0;
END_IF;
CTRL.RESTARTING_CMPLT := FALSE;
END_IF;
IF CTRL.STA_COMPLETING THEN
CASE CFG.STEP2 OF
14000:
CFG.STEP2 := 14001;
CFG.T_STEP2 := 0; (* initialization *)
14001:
CTRL.COMPLETING_CMPLT := TRUE;
CFG.T_STEP2 := 0;
ELSE
CFG.STEP2 := 14000;
CFG.T_STEP2 := 0;
END_CASE;
END_IF;
IF CTRL.STA_COMPLETE THEN
CASE CFG.STEP2 OF
8000:
CFG.STEP2 := 8001;
CFG.T_STEP2 := 0; (* initialization *)
8001:
IF CFG.T_STEP2 > 5000 THEN
CTRL.CMD_RESET := TRUE;
END_IF;
ELSE
CFG.STEP2 := 8000;
CFG.T_STEP2 := 0;
END_CASE;
END_IF;
IF CTRL.STA_PAUSING THEN
CASE CFG.STEP2 OF
3000:
CFG.STEP2 := 3001;
CFG.T_STEP2 := 0; (* initialization *)
3001:
CTRL.PAUSING_CMPLT := TRUE;
CFG.T_STEP2 := 0;
ELSE
CFG.STEP2 := 3000;
CFG.T_STEP2 := 0;
END_CASE;
END_IF;
IF CTRL.STA_PAUSED THEN
CASE CFG.STEP2 OF
4000:
CFG.STEP2 := 4001;
CFG.T_STEP2 := 0; (* initialization *)
4001:
;
ELSE
CFG.STEP2 := 4000;
CFG.T_STEP2 := 0;
END_CASE;
END_IF;
IF CTRL.STA_RESTARTING THEN
CASE CFG.STEP2 OF
7000:
CFG.STEP2 := 7001;
CFG.T_STEP2 := 0; (* initialization *)
7001:
CTRL.RESTARTING_CMPLT := TRUE;
CFG.T_STEP2 := 0;
ELSE
CFG.STEP2 := 7000;
CFG.T_STEP2 := 0;
END_CASE;
END_IF;
IF CTRL.STA_STOPPING THEN
CASE CFG.STEP2 OF
9000:
CFG.STEP2 := 9001;
CFG.T_STEP2 := 0; (* initialization *)
9001:
CTRL.STOPPING_CMPLT := TRUE;
CFG.T_STEP2 := 0;
ELSE
CFG.STEP2 := 9000;
CFG.T_STEP2 := 0;
END_CASE;
END_IF;
IF CTRL.STA_STOPPED THEN
CASE CFG.STEP2 OF
10000:
CFG.STEP2 := 10001;
CFG.T_STEP2 := 0; (* initialization *)
10001:
IF CFG.T_STEP2 > 5000 THEN
CTRL.CMD_RESET := TRUE;
END_IF;
ELSE
CFG.STEP2 := 10000;
CFG.T_STEP2 := 0;
END_CASE;
END_IF;
IF CTRL.STA_HOLDING THEN
CASE CFG.STEP2 OF
5000:
CFG.STEP2 := 5001;
CFG.T_STEP2 := 0; (* initialization *)
5001:
CTRL.HOLDING_CMPLT := TRUE;
CFG.T_STEP2 := 0;
ELSE
CFG.STEP2 := 5000;
CFG.T_STEP2 := 0;
END_CASE;
END_IF;
IF CTRL.STA_HELD THEN
CASE CFG.STEP2 OF
6000:
CFG.STEP2 := 6001;
CFG.T_STEP2 := 0; (* initialization *)
6001:
;
ELSE
CFG.STEP2 := 6000;
CFG.T_STEP2 := 0;
END_CASE;
END_IF;
IF CTRL.STA_ABORTING THEN
CASE CFG.STEP2 OF
11000:
CFG.STEP2 := 11001;
CFG.T_STEP2 := 0; (* initialization *)
11001:
CTRL.ABORTING_CMPLT := TRUE;
CFG.T_STEP2 := 0;
ELSE
CFG.STEP2 := 11000;
CFG.T_STEP2 := 0;
END_CASE;
END_IF;
IF CTRL.STA_ABORTED THEN
CASE CFG.STEP2 OF
12000:
CFG.STEP2 := 12001;
CFG.T_STEP2 := 0; (* initialization *)
12001:
IF CFG.T_STEP2 > 5000 THEN
CTRL.CMD_RESET := TRUE;
END_IF;
ELSE
CFG.STEP2 := 12000;
CFG.T_STEP2 := 0;
END_CASE;
END_IF;
PROC_MACH(
ID := ID,
PRCCFG := CFG,
PRCHMI := HMI,
PRCCTRL := CTRL,
PRCBUF := PRCBUF,
PLCCFG := PLCCFG
);
IF CFG.T_STEP2 > 16#7FFF_FFFF THEN
CFG.T_STEP2 := 16#7FFF_FFFF;
END_IF;
Procedure calls are made unconditionally. For example, below is a sample call of two procedures for a single Unit:
PH_EXMPL1 (ID := 1, (* unique procedure identifier *)
CFG := PHCFG_EXMPL1,
HMI := PHHMI_EXMPL1,
CTRL := PHCTRL_EXMPL1,
PRCBUF := PRCBUF, (* buffer variable for configuration from HMI *)
PLCCFG := PLC,
... // further parameters specific to the implementation
);