Головна > 6.Розроблення підсистеми тривожної сигналізації
6.5. Приклад діаграми поведінки тривоги в часі
Означення автомату станів – це тільки перший крок для створення вдалої системи тривожної сигналізації. Для правильного налаштування тривог треба розуміти послідовність проходження в тривоговому контурі (рис. 6.3 та 6.4) етапів у часі. Не слід забувати, що завдання системи тривожної сигналізації – це своєчасно поінформувати оператора про відхилення, допомогти йому усвідомити причину такого відхилення і максимально допомогти в прийнятті рішення. Якщо оператор не встигне зробити необхідні дії через недостатню усвідомленість, несвоєчасне прийняття дій або з інших причин, то об’єкт може перейти в аварійно небезпечний стан. Для того, щоб краще зорієнтуватися у виборі налаштувань для тривог, у стандарті наводиться приклад діаграми поведінки тривоги в часі (рис. 6.6). На рисунку показано вимірювану технологічну змінну, яка зростає від нормального стану до ненормального (тривожного) за двох можливих сценаріїв, що залежать від того, чи вживає оператор коригувальні дії.
Розглянемо поведінку через діаграму на рис. 6.6 детальніше. Нормальний стан (A) означується як стан, в якому технологічний процес працює в межах звичайних характеристик. Коли вимірювальне значення перетинає уставку тривоги (alarm setpoint), вона переходить до стану непідтвердженої (B). Існує кілька факторів, що впливають на оповіщення про тривогу, які не показані на діаграмі, наприклад (рис. 6.4):
-
точність вимірювання (measurement accuracy);
-
часовий інтервал вибірки (sampling interval) – періодичність, із якою система тривожної сигналізації отримує вимірювальні значення;
-
затримка на включення тривоги (alarm on-delay) – заданий час, який повинен минути після перевищення уставки тривоги, перш ніж тривога стане активною.
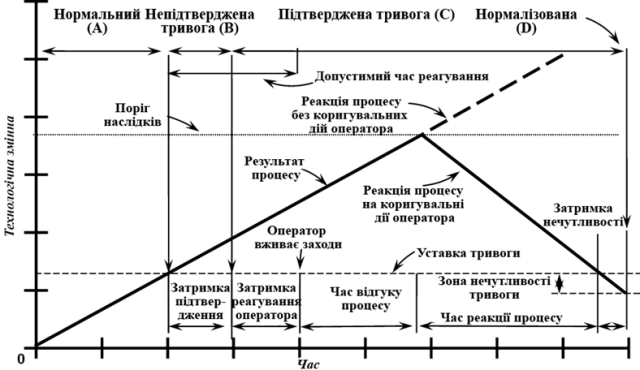
Рис. 6.6. Діаграма поведінки тривоги в часі
Сигнал не відразу підтверджується оператором, проходить певний час (затримка до підтвердження, acknowledge delay), після якого оператор підтверджує тривогу, і вона переходить до стану підтвердженої тривоги (C). Оператор може вжити заходів як до підтвердження тривоги, так і після цього. Протягом цього часу тривога знаходиться в активному стані. Фактичний час реагування (з actual response time) для сигналу тривоги – це максимальний час, що проходить між оповіщенням про тривогу і моментом, коли оператор повинен вжити заходів для уникнення наслідків. Фактичний час реагування включає в себе виявлення сигналу тривоги, діагностування ситуації та визначення оператором коригувальних дій, а також виконання цих дій. Верхня межа часу відгуку – допустимий час реагування (allowable response time) – це максимальний час, що проходить між оповіщенням і моментом, коли оператор повинен вжити заходів для уникнення наслідків. Якщо дія не буде виконана за цей час, то наслідки будуть негативними. На рис. затримка реагування оператора (operation response delay) відображається в межах допустимого часу. Існує кілька факторів, які впливають на час реагування оператора (operator response time):
-
швидкість оброблення системи тривожної сигналізації;
-
конструкція та чіткість засобів HMI;
-
обізнаність та підготовка оператора;
-
навантаження на оператора;
-
складність визначення оператором необхідної дії;
-
складність виконання дії операторові.
Результатом правильної дії оператора в межах допустимого часу реагування повинно бути повернення до нормального стану (D). Поріг наслідків (consequence threshold) є значенням змінної процесу, при якому починається виникнення наслідків. Це може відбутися тоді, коли оператор не виконує жодних дій, вживається неправильна або недостатня дія або дія не завершується протягом допустимого часу відповіді. Вплив зони нечутливості тривоги (alarm deadband) показаний на рис. 6.6 через затримку нечутливості (deadband delay). На рисунку видно, що після перетину уставки тривога повертається до нормального стану не відразу, а лише через певний час. Існує кілька факторів, які впливають на час повернення до нормального стану:
-
затримка реагування оператора (operator response delay);
-
ступінь вжиття коригувальних дій (degree of corrective action taken);
-
час запізнення процесу (process deadtime) у відповідь на коригувальну дію;
-
час реагування процесу (process response time) на коригувальну дію;
-
точність вимірювання змінної процесу;
-
зону нечутливості (deadband) уставки тривоги (alarm setpoint);
-
швидкість функціонування системи тривожної сигналізації.
Наведена на рис. 6.6 діаграма дає змогу на всіх етапах життєвого циклу ґрунтовно підійти до вибору правильних налаштувань. Навіть усвідомлення процесів такого вибору без формального їх виконання допомагає розробникові при створенні підсистем тривожної сигналізації.