Промислові мережі та інтеграційні технології в автоматизованих системах. 8.CAN ПРОТОКОЛ
8.5. Реалізація CAN
Декілька компаній реалізують протоколи CAN у вигляді готових мікросхем, задача яких полягає у забезпеченні основних послуг зв’язку: передача даних, запит на дані, слідкування за помилками та їх ідентифікація. Всі існуючі реалізації використовують контролери CAN, функції та інтерфейс яких сумісний з моделлю реалізації від BOSH. Відмінності заключаються в акцептованій фільтрації, можливості буферизації кадрів та використання деяких додаткових функцій.
Є декілька варіантів реалізації всієї системи обміну з використанням протоколу CAN (рис.8.16):
-
з окремо виділеним CAN-контролером;
-
з інтегрованим CAN-контролером в мікроконтролер;
-
з використанням єдиного чіп сету разом з трансивером;
Перевага першого способу реалізації заключається в багатофункціональності та гнучкості. Такий підхід має місце у випадках використання протоколу верхніх рівнів, які базуються на різних реалізаціях канального та фізичного рівня, або навпаки – коли один і той самий контролер CAN використовується для різних мереж (мультипротокольна реалізація, шлюзи і т.д.).
Інтеграція CAN контролера разом з мікроконтролером збільшує швидкодію взаємодії між складовими та зменшує навантаження на процесори. Ціна такого рішення, порівняно з попереднім способом, як правило нижча, а надійність - вища.
Для систем розподіленого вводу/виводу більш доцільним є використання єдиного мікроконтролера з реалізацією протоколів всіх рівнів. Недоліком таких систем є відсутність можливості комбінації різноманітних технологій тобто гнучкості.
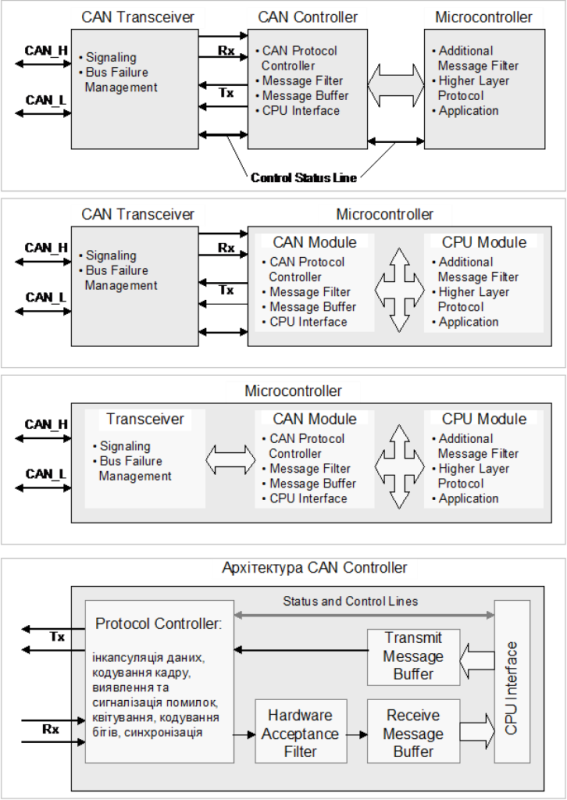
Рис.8.16. Різні варіанти реалізації CAN-вузлів
Окрім контролера протоколу кожен CAN-чіп має вбудований акцептований фільтр для фільтрації повідомлень, буфери для кадрів даних що передаються та відправляються. Реалізація цих функцій а також інтерфейсу з CPU можуть відрізнятися в залежності від реалізації CAN-чіпа.
CAN – дуже цікаве рішення в області промислових мереж. З одного боку він надзвичайно складний в функціонуванні (і в розумінні), з іншого – надійний і ефективний. Окрім того, наявність великої кількості компонентів CAN (від фірм Intel, Philips, Siemens, Motorola) робить систему недорогою.
<– 8.5. Реалізація CAN
–> 9. CANOpen
Контрольні запитання до розділу 8
1) На яких рівнях моделі OSI описаний протокол CAN? Якими засобами необхідно доповнити мікроконтролер CAN для можливості побудови мережі? 2) Який метод доступу до шини та модель адресації використовується в CAN? Розкажіть про їх принципи функціонування. 3) Що таке Ідентифікатор повідомлення і для чого він використовується в CAN шинах?
- Які CAN стандарти існують на сьогоднішній день і чим вони відрізняються?
- Яку типи комунікаційних сервісів використовуються в протоколі CAN? Якими типами кадрів забезпечується передача даних?
- Як реалізовуються функції Запису Об’єкту та Читання Об’єкту?
- Якими типами кадрів забезпечується ідентифікація помилки та затримка передачі наступного кадру?
- За допомогою якого поля кадру даних забезпечується синхронізація приймача з передавачем?
- Розкажіть про призначення Поля Арбітражу в кадрі даних. З яких частин складається це поле? Які типи Ідентифікаторів Ви знаєте? Як визначається пріоритетність Кадру Даних над Дистанційним Кадром?
- Який кадр буде вигравати арбітраж стандартний чи розширений? Поясніть чому?
- Як контролюється вірність доставки даних отримувачем? Як контролюється вірність доставки даних відправником?
- Поясніть, чому Дистанційний Кадр не має Поля Даних?
- Які типи помилок виявляються в CAN?
- Що таке глобалізація помилки і навіщо вона потрібна? Розкажіть про механізм функціонування глобалізації помилки.
- Яким чином в CAN реалізовується захист шини від роботи несправних вузлів? В яких станах може знаходитись вузол CAN з точки зору реакцій на помилки?
- Які функції описує CAN на фізичному рівні? Які функції необхідно додатково реалізувати на фізичному рівні для мереж, які базуються на протоколі CAN?
- Які механізми використовуються в CAN для синхронізації трансмітерів між собою?
- Які стандарти, що базуються на CAN, та описують характеристики трансмітерів Ви знаєте?
- Що описує стандарт ISO 11898?
- Розкажіть про основні характеристики CAN-шини на базі ISO 11898-2: спосіб передачі бітів, топологія, правила термінування, максимальна довжина ліній зв’язку та відгалужень, бітова швидкість, максимальна кількість пристроїв.
- Які протоколи верхніх рівнів базуються на CAN протоколі?
- Які Ви можете назвати варіанти реалізації вузлів CAN?