PACFramework
Класи LVL1
CLSID=16#100x – 16#17FF
Загальний опис
LVL1 (process variables) - технологічні змінні для повної обробки інформації з процесу, включаючи прив’язку до каналу, фільтрацію, масштабування, інверсію і т.п.; для зручності відлагодження процесу; для функцій імітаційного моделювання; для функцій технологічної сигналізації і т.д.
Рекомендується використовувати наскрізну ідентифікацію технологічних змінних (ID) в межах рівня LVL1 для спрощення символьного посилання в HMI.
Рівень технологічних змінних представлений 4-ма класами:
- DIVAR (CLSID=16#101x) – дискретні вхідні змінні процесу,
- DOVAR (CLSID=16#102x) – дискретні вихідні змінні процесу,
- AIVAR (CLSID=16#103x) – аналогові вихідні змінні процесу,
- AOVAR (CLSID=16#104x) – аналогові вихідні змінні процесу,
При необхідності можна виділити окремі класи для мережевих змінних. Обробку мережевих змінних рекомендується виконувати функціями обробки відповідних класичних технологічних змінних.
- NDIVAR (CLSID=16#105x) – мережеві дискретні вхідні змінні процесу,
- NDOVAR (CLSID=16#106x) – мережеві дискретні вихідні змінні процесу,
- NAIVAR (CLSID=16#107x) – мережеві аналогові вихідні змінні процесу,
- NAOVAR (CLSID=16#108x) – мережеві аналогові вихідні змінні процесу,
Використовується єдиний буфер зі структурою VARBUF
Змінна з ідентифікатором 0 зарезервована як порожня неактивна змінна.
Рекомендації щодо використання в HMI
Приклад діагностики та конфігурування аналогових змінних на HMI показаний на рис. Вікна де наводяться перелік всіх технологічних змінних в каркасі називається картою технологічних змінних.
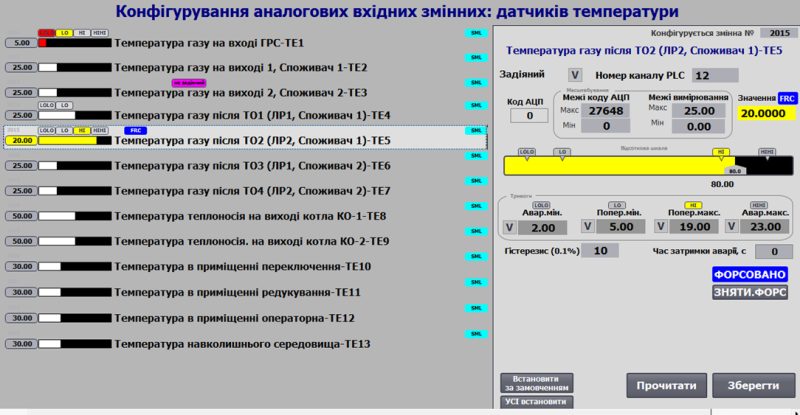
Рис. Приклад використання функцій аналогових вхідних змінних на HMI.
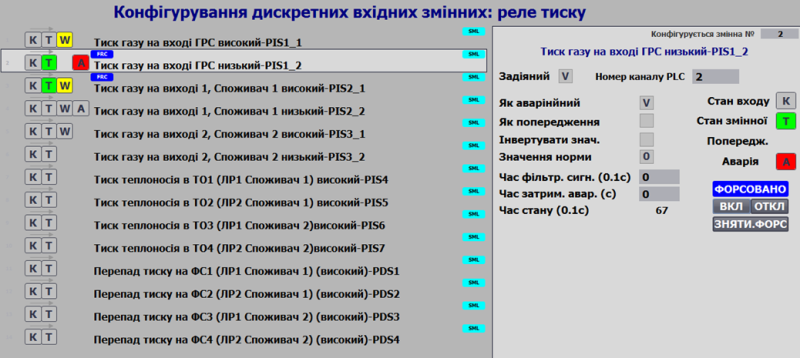
Рис. Приклад налаштування функцій дискретних вхідних змінних на HMI.
Статуси змінних (тривоги, відмови, форсування) супроводжують відображення змінної на всіх мнемосхемах HMI. На наступному рисунку показаний приклад відображення попередження для змінної PT102 для панелі з обмеженою функціональністю (Simatic Basic Panel).

Рис. Приклад відображення статусу змінної HMI.
Загальні вимоги щодо структури змінних класів
Структури повинні містити
| name | type | Опис |
|---|---|---|
| ID | UINT | Унікальний ідентифікатор |
| CLSID | UINT | 16#10xx |
| STA | INT | біти статусу |
| PRM | UINT | параметри конфігурації, повинні зберігатися при відключеному живленні |
| CHID | UINT | Логічний номер дискретного каналу, до якого прив’язана змінна, 0 - немає прив’язки |
| CHIDDF | UINT | Логічний номер каналу за замовченням |
| prm1 | параметри відповідно до класу технологічної змінної | |
| prm2 | параметри відповідно до класу технологічної змінної | |
| prm3 | параметри відповідно до класу технологічної змінної | |
| STEP1 | UINT | номер кроку |
| T_STEP1 | UDINT | Плинний час кроку в мс |
| T_PREV | UDINT | час в мс з попереднього виклику, береться зі структури PLC_CFG.TQMS |
Загальні вимоги до функцій VAR
Функціональні вимоги
СМ-ми першого рівня, типу технологічні змінні можуть бути прив’язані до каналу того ж типу (наприклад дискретний вхід до дискретної вхідної технологічної змінної) по їх номеру. Таким чином прив’язка технологічної змінної до каналу є динамічною, що дозволяє змінювати розташування фізичного підключення конкретного датчика/ВМ у випадку виходу з ладу частини системи. Крім того, таке переключення може бути програмним.
Технологічні змінні знаходяться вище за канали по ієрархії керування. Уся діагностична інформація передається від каналів до змінних. Реалізація цього рівня не залежить від апаратних особливостей контролера, так як усі платформо-залежні тонкощі реалізується на рівні каналів, інтерфейс яких є стандартизованим в каркасі. Технологічні змінні забезпечують наступну функціональність:
-
прив’язка до каналу за його номером та типом
-
відключення з обслуговування (деактивація тривог змінної, врахування верхніми рівнями)
-
відслідковування достовірності значення за помилкою прив’язаного каналу, виходу за діапазон вимірювальної величини, тощо;
-
діагностика роботи каналу (передача діагностичної інформації з прив’язаного
каналу на верхній рівень)
-
обробка вхідного/вихідного значення: масштабування (в т.ч. за необхідністю кусочно-лінійна інтерполяція), фільтрування, інвертування (для дискретних змінних);
-
наявність режиму ручної зміни (форсування); відповідно до ISA-88 - «ручний режим»
-
наявність режиму імітації, в якому для вхідних змінних, значення змінюється CM-мами верхнього рівня (або незалежною програмою), а для вихідних змінних, відбувається замороження значень вихідних каналів
-
обробка тривог (ISA 18.2): реагування на порогові значення, врахування затримки на спрацювання (за необхідності межі задаються окремими уставками), гістерезис, формування загального системного біту аварії/попередження, нова тривога (на один цикл);
-
конфігурування обробки тривог (ISA 18.2): налаштування значень тривог, типів тривог (аварія/попередження/відмова каналу), тимчасове зняття тривоги з обслуговування;
-
підтримка режиму імітації (симуляції)
Робота з буфером
Повинна бути реалізована функція роботи з класичним буфером.
-
Буфер рекомендується використовувати один для всіх технологічних змінних.
-
Факт зайнятості буфера перевіряється за рівністю ідентифікатора класу
CLSIDта ідентифікатора технологічної змінноїID -
при захопленні буферу:
VARBUF.STA = VAR_CFG.STA- IVAR_CFG.CMD = VARBUF.CMD` якщо той не дорівнює нулю (для можливості команд з іншого джерела)
- зчитування статусних бітів фізичного каналу технологічної змінної
VARBUF.CH_STA = CHCFG.STA.
-
конфігурація технологічної змінної повинна зчитуватися в буфер при отриманні команд:
- біті статусу
STA.CMDLOAD=TRUE - оновлення технологічної змінної, яка вже записана в буфер
VARBUF.CMD= 16#0100;
- біті статусу
-
конфігурація технологічної змінної повинна записуватись з буфера при отриманні команд:
VARBUF.CMD= 16#0101;
Повинна бути реалізована функція роботи з параметричними двунаправленим буферами VARBUFIN<->VARBUFOUT.
- Використовується 2 буфери:
- вхідний
VARBUFIN- використовується для обробки команд (при рівності CLSID та ID) та запису інформації в технологічну змінну - вихідний
VARBUFOUT- використовується зчитування інформації з технологічної змінної при отриманні команди на читання зVARBUFIN
- вхідний
- Буфери рекомендується використовувати одну пару для всіх технологічних змінних.
- Факт зайнятості буфера не можливий, оскільки буфер реалізований через 2 буферні змінні VARBUFIN та VARBUFOUT через які інформація проходить для подальшої передачі її в технологічну змінну або внутрішній буфер засобу HMI (по аналогії з параметричним обміном PKW в профілі PROFIDRIVE)
- конфігурація технологічної змінної повинна зчитуватися в вихідний буфер при:
- рівності класів
VARCFG.CLSID=VARBUFIN.CLSID, ідентифікаторівVARCFG.ID=VARBUFIN.IDта отримання команди з вхідного буфераVARBUFIN.CMD=16#100
- рівності класів
- конфігурація технологічної змінної повинна записуватись з вхідного буфера при:
- рівності класів
VARCFG.CLSID=VARBUFIN.CLSID, ідентифікаторівVARCFG.ID=VARBUFIN.IDта отримання команди з вхідного буфераVARBUFIN.CMD=16#101
- рівності класів
Вимоги щодо реалізації інтерфейсу
У інтерфейс повинні передаватися наступні параметри:
- xxVARCFG - INOUT
- xxVARHMI - INOUT
- CHCFG - INOUT
За умови, що немає можливості доступатися до зовнішніх змінних з середини функцій, передається PLC_CFG, VARBUF, VARBUFIN, VARBUFOUT ; альтернативно можна використовувати інші інтерфейси для використання в середині PLC_CFG
Вимоги щодо реалізації програми користувача
Необхідно передбачити в загальній програмі (по за функцією реалізації класу):
- при першому старті:
- ініціалізацію ідентифікаторів змінних (ID)
- займання буферу якоюсь однією змінною
- контроль конфлікту займання змінною каналу, який вже зайнятий іншою змінною через роботу з буфером
Необхідно передбачити в програмі реалізації класу:
- при першому старті:
- ініціалізацію класів змінних (CLSID)
- запис значень CHID (ID каналів) за замовченням, якщо CHID=0
- PRM_DSBL:=FALSE
- T_PREV := PLC_CFG.TQMS
- T_STEP1 :=0
- запис значень CHID (ID каналів) за замовченням за відповідною командою
Тестування
Перелік загальних тестів
| Номер | Назва | Коли перевіряти | Примітки |
|---|---|---|---|
| 1 | Присвоєння ID та CLSID при старті | після реалізації функції | |
| 2 | Команди запису до буферу | після реалізації функції | |
| 3 | Зміна параметрів та запис з буфера | після реалізації функції | |
| 4 | Зміни логічного номеру каналу | після реалізації функції | |
| 5 | Запис значення CHID за замовченням при старті, при одинарній команді | після реалізації функції | |
| 6 | Робота вбудованих лічильників часу | після реалізації функції | |
| 7 | Вплив перекидування лічильника часу ПЛК на час кроку | після реалізації функції | |
| 8 | Алгоритм Ping-Pong | після реалізації функції | |
| 9 | Робота в нефорсованому режимі | після реалізації функції | |
| 10 | Робота в форсованому режимі | після реалізації функції | |
| 11 | Відправка широкомовних команд на дефорсування | після реалізації функції | |
Методика виконання загальних та спеціальних тестів описана в методиках тестування кожного класу.