ПРОГРАМУВАННЯ ОДНОКРИСТАЛЬНИХ МІКРОПРОЦЕСОРНИХ КОНТРОЛЕРІВ, Євген Проскурка
Лаб6. Робота таймерів/лічильників в мікроконтролерах сімейства megaAVR <– Зміст –> Лаб8. Робота з аналогово-цифровим перетворювачем мікроконтролерів сімейства megaAVR
ЛР7 Інтерфейс SPI та динамічна індикація
Мета роботи: ознайомитися з роботою інтерфейсу SPI та принципом роботи динамічної індикації.
1. Завдання на виконання роботи
1.1. Скласти схему наведену на рис. 7.1 в програмному середовищі Proteus. При складані схеми використати наступні компоненти представлені в таблиці 7.1.
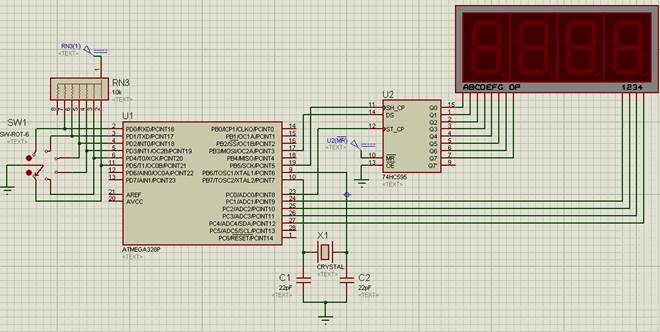
Рис. 7.1. Схема в програмному середовищі Proteus.
Таблиця 7.1. Список елементів.
| Найменування | Кількість | Опис |
|---|---|---|
| RES8SIPB | 1 | магазин резисторів, номіналами по 10 кОм |
| 74HC595 | 1 | здвиговий резистор |
| SW-ROT6 | 1 | перемикач на 6 позицій |
| 7SEG-MPX4-CC | 1 | семисегментний індикатор на 4 цифри, загальний катод |
| ATMEGA328p | 1 | мікроконтролер AVR ATmega328p |
| CAP | 2 | конденсатори, номіналами 22 пФ |
| CRYSTAL | 1 | кварцовий резонатор номіналом 16 MHz |
1.2. Доповнити написану програму в середовищі AVR Studio для функціонування схеми. Алгоритм функціонування схеми наступний: змінюючи положення перемикача виводити на семисегментний індикатор числа згідно варіанту таблиці 7.2.
1.3. Протестувати написану програму в середовищі AVR Studio на схемі в програмному середовищі Proteus.
2. Теоретичні відомості
2.1. Інтерфейс SPI
Інтерфейс SPI (Serial Peripheral Bus) – інтерфейс для обміну даними між мікросхемами. Розроблений компанією Motorola, але в даний час використовується в продукції багатьох виробників. Шина SPI організована як “ведучий-ведений” (“master”-“slave”). В якості ведучого найчастіше виступає мікроконтролер. Зовнішні пристрої підключені до ведучого є веденими (підлеглими). Якщо з’єднати два мікроконтролера по шині SPI, то вони можуть по черзі ставати ведучим або веденим. Головне, що в конкретний момент часу на шині SPI тільки один пристрій може бути ведучим. Розглянемо на прикладі AVR ATmega328p які ніжки в МК пов’язані з шиною SPI і що вони означають (рис. 7.2).
Ніжка SS використовується для вибору ведучого/веденого; на ніжці SCK генерується тактовий сигнал; ніжка MOSI використовується для виводу даних; ніжка MISO використовується для прийому даних.

Рис. 7.2. Інтерфейс SPI в МК AVR ATmega328p.
При завантаженні значення в регістр даних SPI ведучого він відразу ж починає генерувати тактовий сигнал на ніжці SCK і побітно висувати дані на ніжку MOSI, яка з’єднана з входами ніжок MOSI ведених пристроїв. Ведений пристрій отримає дані, тільки якщо на ніжці веденого SS присутній низький рівень. Ми можемо підключити до шини SPI мікроконтролера кілька SPI пристроїв і використовуючи додаткові ніжки МК вибирати конкретний пристрій з яким ми хочемо в даний момент працювати. Ніжку SS ведучого можна конфігурувати як вихід і використовувати його як вихідний контакт. Якщо ж він налаштований як вхід, його необхідно підключити до шини живлення. Якщо на ніжці SS ведучого пристрою з’явиться низький рівень, то він перейде в режим веденого. На рис. 7.3 представлено приклад підключення пристроїв по шині SPI.
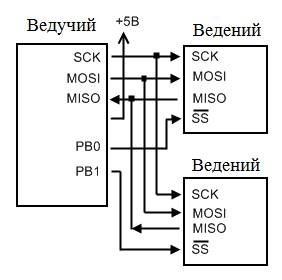
Рис. 7.3. Підключення пристроїв по шині SPI.
Взагалі, зручний цей інтерфейс тим, що з ним дуже просто працювати. Давайте розглянемо регістри МК, пов’язані з шиною SPI.
Регістр SPDR – регістр даних в якому зберігається байт, що відправляється чи зберігається.
Регістр SPCR

Біт 7 – SPIE: дозвіл переривань. Переривання генерується, якщо цей біт встановлений і встановлений біт глобального дозволу переривань регістра SREG (6-й біт).
Біт 6 – SPE: включення SPI. Перед будь-якими діями з SPI цей біт повинен бути встановлений в “1”.
Біт 5 – DORD: порядок передачі даних. Якщо цей біт встановлений в “1” то молодший біт даних передається першим. Якщо цей біт скинутий в “0” – старший біт даних передається першим.
Біт 4 – MSTR: вибір режиму роботи. Якщо встановлений в “1”, то обраний режим ведучого, якщо в “0” – режим веденого. Якщо SS налаштований як вхід і на нього подано низький рівень, в той час як біт MSTR встановлений в “1”, тоді цей біт скинеться в “0” і біт SPIF регістра SPSR (див. нижче) встановиться в “1”.
Біт 3 – CPOL: полярність тактового сигналу. “0” – під час очікування на SCK присутній низький рівень. “1” – під час очікування на SCK присутній високий рівень.
Біт 2 – CPHA: фаза тактового сигналу. Якщо цей біт встановлений в “1”, то дані зчитуються по задньому фронту SCK, якщо в “0” – по передньому фронту SCK.
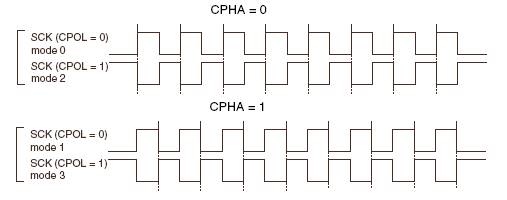
Таким чином установкою цих біт ми можемо вибирати один з чотирьох режимів роботи шини SPI.
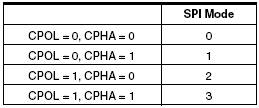
При з’єднанні МК з яким-небудь пристроєм, необхідно дивитися уважно в документації на пристрій режими які він підтримує. Ведучий і ведений пристрої працюючи в різних режимах не сумісні.
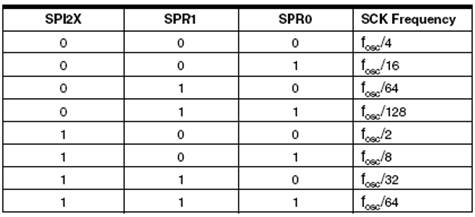
Біти 1:0 – SPR1:SPR0: швидкість передачі (частота тактування). Тільки для пристроїв в режимі ведучого. Якщо МК налаштований на роботу в якості веденого, установка цих біт не матиме ніякого ефекту. У таблиці нижче можна подивитися які значення потрібно записати в ці біти, щоб встановити потрібну швидкість передачі (Біт SPI2X в регістрі SPSR).
Регістр SPSR

Біт 7 – SPIF: прапорець переривання. Встановлюється по завершенні передачі. Переривання генерується якщо встановлений біт SPIE регістру SPCR і біт I регістра SREG.
Біт 6 – WCOL: прапорець колізій запису. Встановлюється в “1” при спробі запису в регістр SPDR до закінчення передачі.
Біт 0 – SPI2X: біт подвійної швидкості SPI. Якщо SPI налаштований як ведучий, тоді ми можемо працювати з подвійною частотою. Але якщо SPI налаштований як ведений, то ми не можемо розраховувати на подвійну швидкість роботи SPI.
Вектор переривання в записується так – SPI_STC_vect. Якщо хочемо використовувати переривання, тоді повинні встановити відповідні біти в регістрах і викликати функцію обробника переривання:
ISR (SPI_STC_vect) {}
2.2. Принцип роботи здвигового регістру
Паралельно-послідовні регістри (здвигові регістри) мають або паралельний вхід та послідовний вихід, або послідовний вхід та паралельний вихід. В перших регістрах інформація записується одночасно по паралельних входах, а зчитується почергово, в других – записується почергово, а зчитується одночасно.
Здвиговий регістр 74НС595 має послідовний вхід та паралельний 8-ми бітний вихід (рис. 7.4).
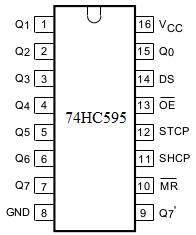
Рис. 7.4. Здвиговий регістр 74НС595.
Мікросхема перетворює вхідний послідовний сигнал на ніжці 1 (DS) в вихідний паралельний на 8 ніжках (Qx). Послідовна передача синхронна: для такту використовується додатковий пін, ніжка SHCP. Також окремим піном управляється регістр даних, ніжка STCP, що дозволяє змінювати сигнал на 8 виходах одноразово, коли всі дані передані.
Таким чином з трьох пінів (ніжок) мікроконтролера можна отримати 8 цифрових виходів. З регістрів 74HC595 можна робити каскади, підключаючи один за іншим (через пін Q7’), і таким чином з тих самих 3 вхідних ліній отримувати 16, 24, 32 і т.д. цифрових виходів.
Пін  – дозвіл виводу даних на паралельні виходи. Риска зверху означає, що активний рівень для цього входу – низький. Коли на цьому вході низький рівень, паралельні виходи будуть включені, коли високий – вимкнені. У більшості випадках контакт підключений до землі, тому паралельні виходи постійно знаходяться у включеному стані.
– дозвіл виводу даних на паралельні виходи. Риска зверху означає, що активний рівень для цього входу – низький. Коли на цьому вході низький рівень, паралельні виходи будуть включені, коли високий – вимкнені. У більшості випадках контакт підключений до землі, тому паралельні виходи постійно знаходяться у включеному стані.
Пін  – це вхід скидання. Подача на нього напруги низького рівня очищає вміст регістра зсуву. У більшості випадках контакт підключений до шини 5 B, щоб запобігти очищення зсувного регістру.
– це вхід скидання. Подача на нього напруги низького рівня очищає вміст регістра зсуву. У більшості випадках контакт підключений до шини 5 B, щоб запобігти очищення зсувного регістру.
2.3. Принцип роботи динамічної індикації
Динамічна індикація – це метод відображення цілісного зображення шляхом швидкого послідовного відображення його частин. Видимість цілісності при цьому досягається завдяки інерційності людського зору.
Звичайно, якщо нам потрібно виводити число в 1-2 розряда, то можна просто приєднати індикатори до портів МК посегментно. Проте, якщо розрядів, скажімо 6 (годинник наприклад), то необхідно використати 6*7=42 вивода портів. Таку кількість мають далеко не всі МК. Тут то і приходить на допомогу динамічна індикація. Суть її в даному випадку в тому, що ми з’єднуємо, припустимо усі однойменні аноди розрядів (для індикаторів зі спільним катодом), і заводимо на виводи одного порта, а катоди кожного з розрядів – на інший порт. Таким чином, використовується всього 8+6=14 виводів портів МК. Ще більше зменшити число задіяних виводів можна за допомогою регістрів здвигу, так часто роблять при великій кількості розрядів. Індикація відбувається шляхом швидкого циклічного показу кожного розряду числа з відповідно включеним в той момент катодом.
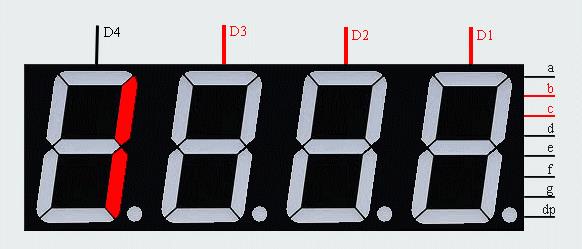
Припустимо нам треба вивести число 1234 на 4-х числовому семисегментному індикаторі:
1.1. Подаємо сигнал лог.0 на перший катод (на інших лог. 1)
1.2. Подаємо на аноди комбінацію, що відповідає числу 1. На першому індикаторі засвітиться 1. решта будуть погашені.
1.3. Утримуємо вказаний стан на протязі певного часу, наприклад 0,01с.
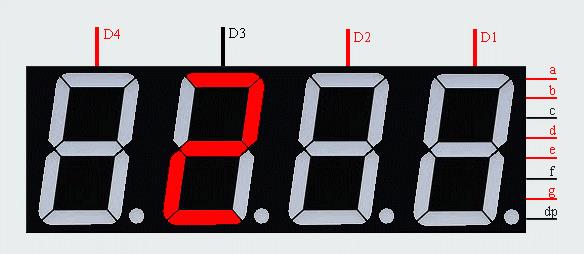
2.1. Подаємо сигнал лог. 0 на другий катод (на інших лог. 1)
2.2. Подаємо на аноди комбінацію, що відповідає числу 2. На другому індикаторі засвітиться 2, решта будуть погашені.
2.3. Утримуємо вказаний стан на протязі певного часу, наприклад 0,01с.
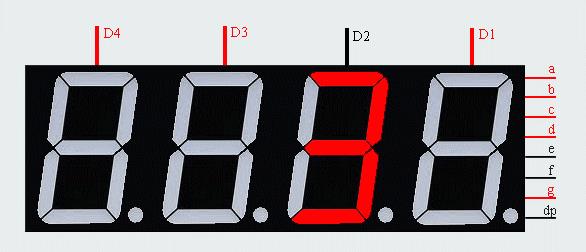
3.1. Подаємо сигнал лог. 0 на третій катод (на інших лог. 1)
3.2. Подаємо на аноди комбінацію, що відповідає числу 3. На третьому індикаторі засвітиться 3, решта будуть погашені.
3.3. Утримуємо вказаний стан на протязі певного часу, наприклад 0,01с.
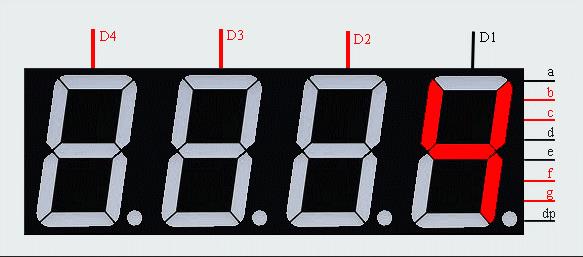
4.1. Подаємо сигнал лог.0 на 4-ий катод (на інших лог. 1)
4.2. Подаємо на аноди комбінацію, що відповідає числу 4. На 4-му індикаторі засвітиться 4, решта будуть погашені.
4.3. Утримуємо вказаний стан на протязі певного часу, наприклад 0,01с.
5.1. Переходимо до п.1.1.
3. Порядок виконання роботи
3.1. Створити проєкт в AVR Studio 4. Налаштування проєкту виберемо такі як у попередній лабораторній роботі.
3.2. Додати до файлу програму, яка необхідна для програмування заданого алгоритму:
#define F_CPU 16000000UL
#include <avr/io.h>
#include <avr/interrupt.h>
#include <util/delay.h>
ISR(SPI_STC_vect) {
PORTC |= (1 << PORTC0);
PORTC &= ~(1 << PORTC0);
}
int number(int n) {
int num = 0;
switch(n) {
case 0: {
num=0x …; // Вказати hex-код цифри 0
break;
}
case 1: {
num=0x…; // Вказати hex-код цифри 1
break;
}
case 2: {
num=0x…; // Вказати hex-код цифри 2
break;
}
case 3: {
num=0x…; // Вказати hex-код цифри 3
break;
}
case 4: {
num=0x…; // Вказати hex-код цифри 4
break;
}
case 5: {
num=0x…; // Вказати hex-код цифри 5
break;
}
case 6: {
num=0x…; // Вказати hex-код цифри 6
break;
}
case 7: {
num=0x…; // Вказати hex-код цифри 7
break;
}
case 8: {
num=0x…; // Вказати hex-код цифри 8
break;
}
case 9: {
num=0x…; // Вказати hex-код цифри 9
break;
}
default: break;
}
return num;
}
int main(void) {
DDRD = 0x00;
PORTD = 0xFF;
DDRB = 0xFF;
PORTB = 0xFF;
DDRC = 0xFF;
PORTC |= (1 << PORTC1) | (1 << PORTC2) | (1 << PORTC3) | (1 << PORTC4);
SPCR |=(1 << SPIE) | (1 << SPE) | (0 << DORD) | (1 << MSTR) | (0 << CPHA) | (0 << SPR1) | (1 << SPR0);
sei();
while (1) {
if (PIND == 0xFE) {
SPDR = number(…); // Вказати цифру числа №1, яку треба вивести згідно варіант
_delay_us(20);
PORTC &= ~(1 << PORTC1);
_delay_ms(1);
PORTC |= (1 << PORTC1);
SPDR = number(…); // Вказати цифру числа №1, яку треба вивести згідно варіанту
_delay_us(20);
PORTC &= ~(1 << PORTC2);
_delay_ms(1);
PORTC |= (1 << PORTC2);
SPDR = number(…); // Вказати цифру числа №1, яку треба вивести згідно варіанту
_delay_us(20);
PORTC &= ~(1 << PORTC3);
_delay_ms(1);
PORTC |= (1 << PORTC3);
SPDR = number(…); // Вказати цифру числа №1, яку треба вивести згідно варіанту
_delay_us(20);
PORTC &= ~(1 << PORTC4);
_delay_ms(1);
PORTC |= (1 << PORTC4);
}
if (PIND == 0x…) { // Вказати hex-код для зчитування положення перемикача
// Вказати програмний код для виводу числа №2 згідно варіанту
}
if (PIND == 0x…) { // Вказати hex-код для зчитування положення перемикача
// Вказати програмний код для виводу числа №3 згідно варіанту
}
if (PIND == 0x…) { // Вказати hex-код для зчитування положення перемикача
// Вказати програмний код для виводу числа №4 згідно варіанту
}
if (PIND == 0x…) { // Вказати hex-код для зчитування положення перемикача
// Вказати програмний код для виводу числа №5 згідно варіанту
}
if (PIND == 0x…) { // Вказати hex-код для зчитування положення перемикача
// Вказати програмний код для виводу числа №6 згідно варіанту
}
}
}
Функція-переривання ISR(SPI_STC_vect) виникає після завершення передачі числа по SPI і подає команду здвиговому регістру вивести отримане число на піни Q0-Q7.
Таблиця 7.2. Варіанти завдання
| № варіанту | Число №1 | Число №2 | Число №3 | Число №4 | Число №5 | Число №6 |
|---|---|---|---|---|---|---|
| 1 | 1802 | 7639 | 4185 | 7694 | 1785 | 7195 |
| 2 | 2761 | 4527 | 9271 | 6798 | 9342 | 7514 |
| 3 | 1362 | 3210 | 8973 | 9165 | 3061 | 9485 |
| 4 | 7530 | 7459 | 7834 | 4251 | 5463 | 7524 |
| 5 | 4903 | 2064 | 1547 | 9843 | 4352 | 7249 |
| 6 | 1362 | 3428 | 5734 | 6342 | 2431 | 1305 |
| 7 | 7864 | 9814 | 8103 | 9156 | 8130 | 1423 |
| 8 | 3128 | 1975 | 4316 | 3495 | 2587 | 6908 |
| 9 | 7865 | 4716 | 7613 | 3412 | 4678 | 2831 |
| 10 | 6302 | 9297 | 6497 | 8096 | 7156 | 9562 |
| 11 | 4735 | 8217 | 1829 | 6185 | 2347 | 4698 |
| 12 | 5927 | 4730 | 8671 | 2498 | 6079 | 5987 |
| 13 | 9263 | 4170 | 6574 | 5987 | 3689 | 3968 |
| 14 | 7014 | 4710 | 4023 | 7958 | 8265 | 3452 |
| 15 | 2017 | 9821 | 5273 | 5615 | 9231 | 3769 |
| 16 | 2834 | 8453 | 2174 | 6147 | 9654 | 8402 |
| 17 | 6143 | 4139 | 9612 | 7653 | 8674 | 9128 |
| 18 | 5106 | 1836 | 7632 | 3827 | 8973 | 4985 |
| 19 | 2974 | 8201 | 2193 | 5314 | 9048 | 4605 |
| 20 | 3827 | 1543 | 7689 | 6315 | 6172 | 9518 |
| 21 | 3465 | 8329 | 9405 | 2016 | 4902 | 4531 |
| 22 | 2984 | 3812 | 1348 | 2157 | 6314 | 3710 |
| 23 | 1097 | 9243 | 9742 | 7068 | 4856 | 8567 |
| 24 | 6395 | 4230 | 6052 | 3012 | 5367 | 3026 |
| 25 | 6847 | 7578 | 6123 | 6125 | 2703 | 3405 |
| 26 | 5734 | 3420 | 4860 | 2098 | 7570 | 8521 |
| 27 | 6031 | 9418 | 9869 | 3615 | 2870 | 6902 |
| 28 | 4863 | 1269 | 3046 | 2584 | 2546 | 1306 |
| 29 | 3176 | 4127 | 5497 | 2543 | 1728 | 1497 |
| 30 | 6058 | 3247 | 1572 | 7541 | 5163 | 7321 |
3.3. Запустити програмне середовище Proteus. Побудувати схему за рис. 7.1, при цьому використати елементи з таблиці 7.1.
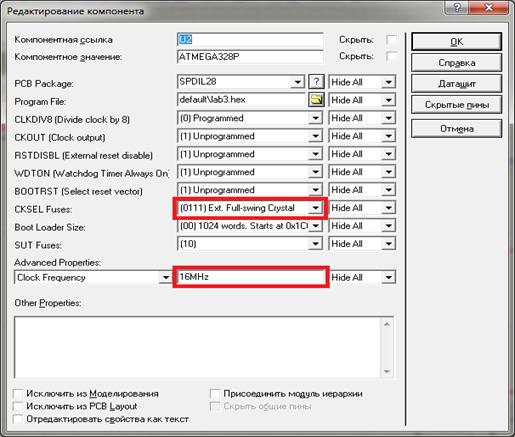
3.4. Вказати в елементі ATMEGA328p шлях до hex-файлу та задати в меню настройку CKSEL Fuses і в ручну вписати частоту 16MHz, як вказано на рисунку:
3.5. Промоделювати роботу схеми. Впевнитися, що вона працює за заданим алгоритмом.
3.6. Оформити звіт про роботу.
4. Вміст звіту про роботу
4.1. Назва, мета та завдання на виконання роботи.
4.2. Зображення схеми зібраної в програмному середовище Proteus.
4.3. Лістінг програми написаної в програмному середовищі AVR Studio.
5. Контрольні питання
5.1. Пояснити, принцип роботи динамічної індикації.
5.2. Пояснити принцип роботи здвигового регістру.
5.3. Пояснити принцип роботи інтерфейсу SPI.
Лаб6. Робота таймерів/лічильників в мікроконтролерах сімейства megaAVR <– Зміст –> Лаб8. Робота з аналогово-цифровим перетворювачем мікроконтролерів сімейства megaAVR